在2.1.1节和2.1.2节中学习了硬盘的外壳和电路板结构,下面对硬盘内部构造做详细讲解。
首先看一下硬盘的内部结构,如图2-13所示。
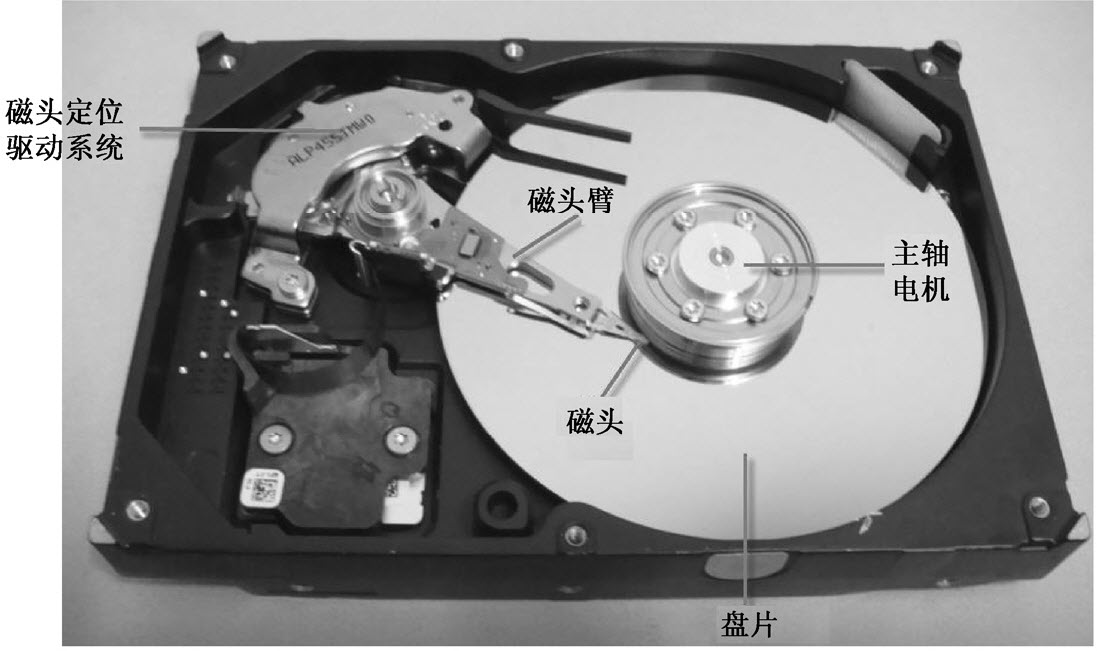
图2-13 硬盘内部结构
硬盘中驱动磁头沿盘面径向位置运动以寻找目标磁道的系统叫磁头定位驱动系统。精密、快速的磁头驱动定位系统是实现高密度存储高速存取的最基本的技术保障。
定位驱动系统由驱动部件和运载部件(也称为磁头臂)组成。在硬盘存取数据时,磁头臂的运动驱动磁头进入指定磁道的中心位置,并精确地跟踪该磁道。
定位驱动系统的驱动方式主要有步进电机驱动和音圈电机驱动两种。
步进电机驱动系统的结构紧凑,控制简单,但是整个驱动定位系统是开环控制。步进电机靠脉冲信号驱动,因此定位精度比较低,一般用于软磁盘驱动器和道密度不高的硬盘驱动器,其道密度在300TPI左右。步进电机驱动的另一个问题是寻道时间比较长,因此,存取时间较长。
一块使用步进电机的硬盘内部结构如图2-14所示。

图2-14 使用步进电机的硬盘的内部结构
现在的磁盘普遍采用音圈电机驱动和伺服盘定位。音圈电机是线性电机,可以直接驱动磁头作直线运动。整个驱动定位系统是一个带有速度和位置反馈的闭环调节自动控制系统,驱动速度快,而且定位精度高。
图2-13中硬盘的磁头定位驱动系统使用的就是音圈电机。
一块硬盘的音圈电机结构如图2-15所示。
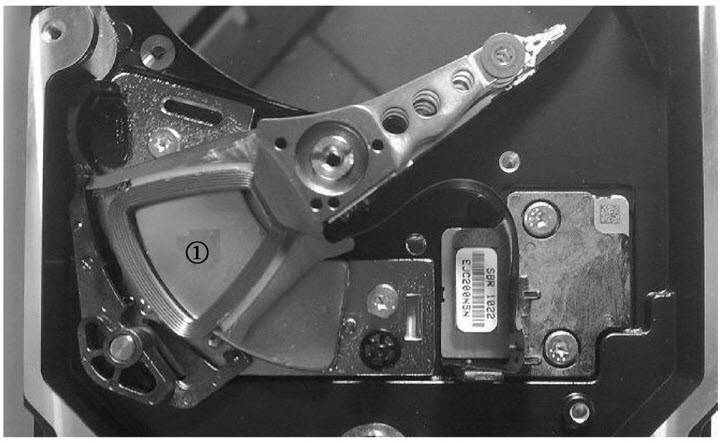
图2-15 音圈电机结构
图中的“①”就是音圈电机部分,由磁铁和线圈组成。
硬盘的磁头定位驱动系统在工作时各部分作用如下:
①位置检测电路检出磁头当前所在位置。
②由控制器送来要求磁头寻找的目的磁道的位置。
③逻辑电路求出目标位置与磁头当前所在位置的差值。
④模拟控制电路根据差值及磁头现在运行速度求出磁头运动方向和速度。
⑤功率放大器把信号放大为驱动磁头运动的电流。
⑥音圈电机推动磁头臂到预定位置。
为使磁头快速精确地定位,磁头定位驱动系统必须采用四环控制方式。除了有电机驱动系统以外,还应有位置检测系统和速度控制系统反馈磁头当前所在位置及运动速度,根据磁头当前位置和目标位置的差值控制磁头运动的速度和方向,以逐步精确定位到目标磁道。
位置检测的方法很多,有光栅位置检测、感应同步器检测、伺服盘定位检测及嵌入式伺服检测等。在伺服盘定位检测机构中,伺服盘就是在盘片组中设置一个用做位置传感的专用盘面,在该盘面上记录有磁道位置信息,定位时由一个专用的伺服磁头读出,便得到反映磁道位置的信号。
硬盘寻道定位一般采用嵌入式伺服,这就要求磁头既能读取记录数据,又能读取磁道伺服信息。