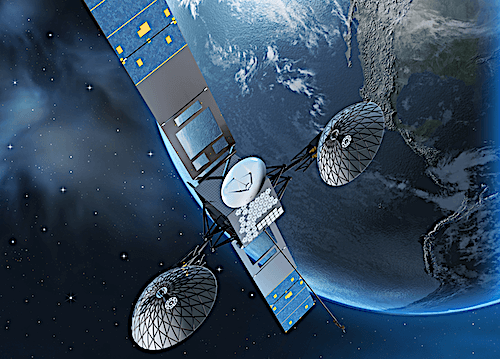
主要功能
- 具备对深空探测器平台及载荷的测距、测速和跟踪能力;
- 具备对深空探测器下行遥测、数传信号的接收能力;
- 具备对1个目标上行遥控和数据注入能力;
- 具备对同一个波束内2个目标下行信号的同时接收能力。
根据不同任务的工作要求,多功能数字基带分系统具备满足表5-1所列举的多种系统工作方式的能力。
表5-1 系统工作方式
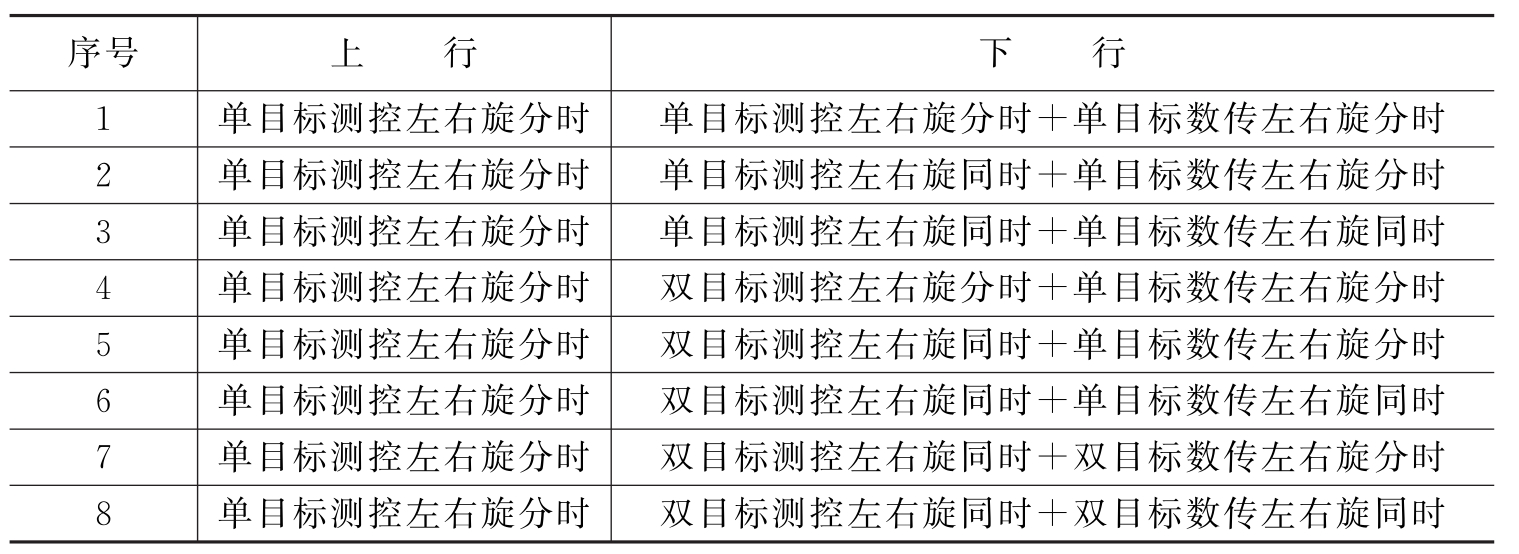
注:1.双目标工作方式既可在一个频段也可在不同频段;2.测控或数传可分时工作;3.左右旋同时工作时在基带进行极化合成。
技术指标
测控
(1)中频接收(含测速模块)
- 输入信号中心频率:70MHz。
- 输入信号电平:-60~0dBm。
- 接收灵敏度(S/Φ)载波:20dBHz(双边环路带宽10Hz),无多普勒预报;
0dBHz(双边环路带宽0.1Hz),加多普勒预报。
4)动态特性
- S频段:最大多普勒频率±600kHz;多普勒频率变化率≤200Hz/s。
- X频段:最大多普勒频率±2400kHz;多普勒频率变化率≤800Hz/s。
5)下行多普勒预置范围
- S频段:±600kHz(步进1kHz);
- X频段:±2400kHz(步进1kHz)。
6)环路带宽(双边带宽):0.1Hz、1Hz、10Hz、50Hz、200Hz、500Hz、1kHz、2kHz分档可变,并具有自动变带宽能力(低信噪比时,环路带宽自动宽转窄)。
7)输入信号调制体制:PM。
8)信号调制度
- 侧音:0.1~1.0rad;
- 遥测:0.1~1.6rad;
- 当遥测副载波为方波时,调制度为1.57rad,码速率(编码后)为100b/s~2Mb/s;其他调制度时,码速率(编码后)为1b/s~2Mb/s。
9)AGC动态范围:≥60dB。
10)AGC控制精度:≤1dB。
11)AGC时间常数:10ms、100 ms、1000 ms、10000 ms(统一按闭环状态下定义)。
12)测速精度
• S频段: ≤0.9mm/s((S/Φ)载波=20dBHz,2BL=10Hz,积分时间τ=10s)。
≤0.9mm/s((S/Φ)载波=20dBHz,2BL=10Hz,积分时间τ=10s)。
• X频段:≤0.08mm/s((S/Φ)载波=20dBHz,2BL=10Hz,积分时间τ=60s)。
13)三向测距精度:
- 随机误差:σR≤2m;
- 系统误差:ΔR≤8m。
14)具有载波防错锁能力。
15)能够适应上行载波频率最大扫描速度引起的下行频率变化(环路带宽大于10Hz时)。
- 接收信号(S/Φ)载波=20~23dBHz时,可适应上行载波最大扫描速度小于或等于46kHz/s时最大扫描速度引起的下行频率变化;
- 接收信号(S/Φ)载波≥23dBHz时,可适应上行载波最大扫描速度小于或等于50kHz/s时最大扫描速度引起的下行频率变化。
16)具备单向、双向和三向多普勒测速功能
- 单向测速:指接收航天器下行信号,测量单向多普勒,实现单向测速;
- 双向测速:指本站发射的上行载波信号,经应答机相干转发后,由本站接收该下行信号,测量双向多普勒,得到目标径向速度;
- 三向测速:指本站发射上行载波信号,经应答机相干转发后,由第二个
站接收下行信号,测量多普勒,计算得到距离和变化率。
17)多普勒采样率:20Hz,1Hz,0.1Hz,1/60Hz,采样间隔300s范围内任意整秒可选。
(2)上行调制
1)侧音测距调制信号
- 侧音波形:正弦波或方波;
- 主音频率:100kHz、500kHz(可选);
- 次音频率:100kHz(主音500kHz时)、20kHz、4kHz、800Hz、160Hz、32Hz、8Hz、2Hz、0.5Hz,采用折叠音,低侧音折叠在16kHz上,最低侧音频率可设(8Hz、2Hz、0.5Hz);
- 调制度:0.1~1.4rad,准确度±5%,步进0.01rad;
- 测距和遥控同时:≤1.75rad;
- 侧音发送方式:捕获时由高到低依次发送测距侧音,测量时只发主音。
2)音码混合测距
- 测距主音:100kHz~1.5MHz可选(1Hz连续可变);
- 测距码周期:2n/ft,n=0,1,…,20(ft为测距主音频率);
- 调制方式:PCM/PM/PM(测距码对侧音进行PM调制,调制指数为45°或22.5°,测距侧音对载波进行PM调制);
- 侧音调制度:0.1~1.4rad,准确度±5%,步进0.01rad;
- 测距和遥控同时:≤1.75rad。
3)纯伪码测距
• 伪码结构:T2B和T4B,复合码的产生原理见图5-1和图5-2。
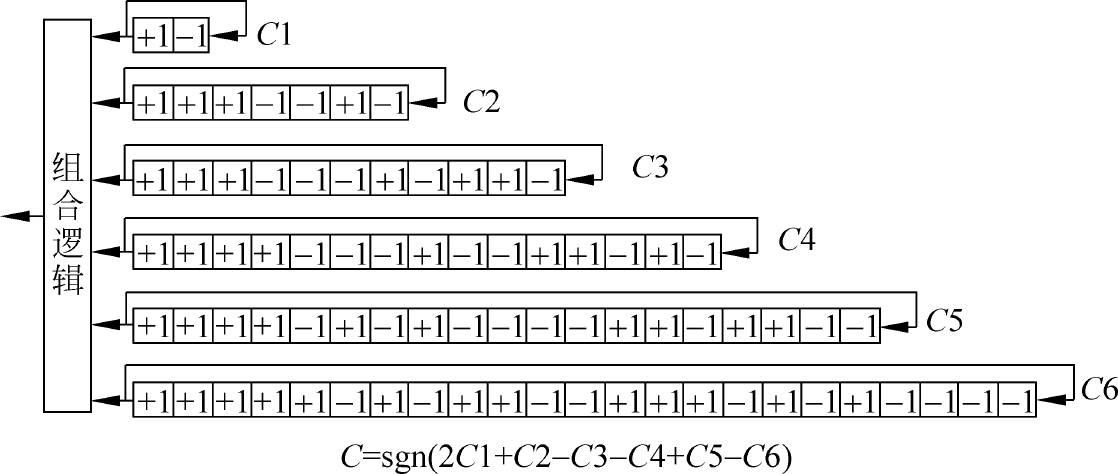
图5-1 T2B复合码的产生原理
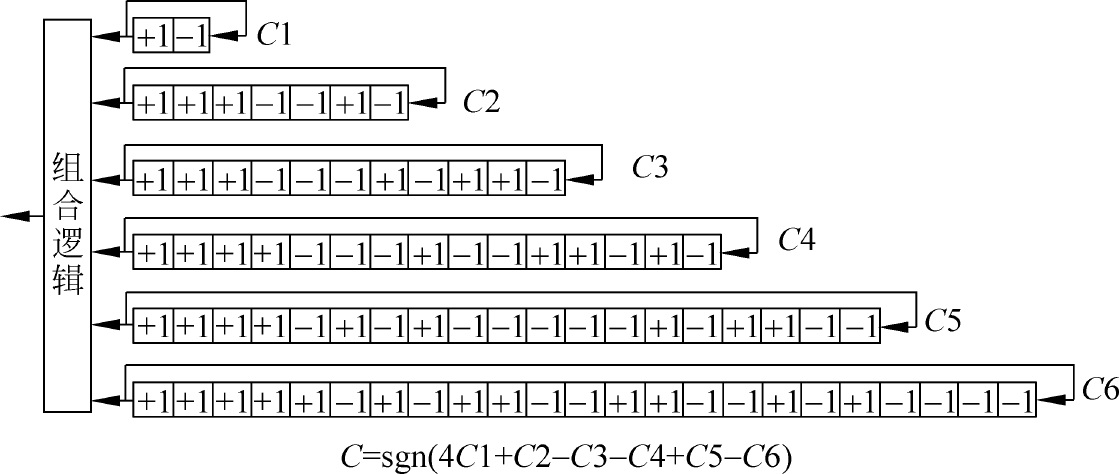
图5-2 T4B复合码的产生原理
• 上行信号链路信号处理:伪码测距信号对上行载波进行调制,设伪码测距信号为m(t),β为上行测距调制度,上行载波频率为ωc,则调制后的信号为

调制度β要求为0.2~1.6rad,准确度±5%,步进0.01rad。
伪码测距信号在调制之前具备基带成形功能。基带成形滤波器的冲击响应为

式中 T——伪码码片宽度。
• 上行链路伪码码片速率:伪码测距信号码片速率与上行载波频率相干。伪码码片速率、测距时钟频率和上行载波频率的关系满足下列关系式:

式中 F码片——伪码码片速率(Mb/s);
F时钟——测距时钟频率(MHz);
fS频段——S频段上行链路的频率(MHz);
fX频段——X频段上行链路的频率(MHz);
k=6,l={1,2,…,12,16,32或64}或者l=2,k={8,9或10}。
4)遥控调制信号
- 副载波波形:正弦波或方波;
- 调制度:0.1~1.4rad;
- 准确度:±5%,步进0.01rad。
5)输出信号频率:中心频率为70MHz的调相信号。
6)上行调制扫描
- S频段:扫描速率:±1Hz/s~±50kHz/s,1Hz/s或1kHz/s步进可设;扫描范围:±300kHz,1kHz步进可设。
- X频段:扫描速率:±1Hz/s~±50kHz/s,1Hz/s或1kHz/s步进可设;扫描范围:±1200kHz,1Hz/s或1kHz/s步进可设。
7)上行多普勒预置
- S频段:最大为±300kHz,步进1Hz。
- X频段:最大为±1200kHz,步进1Hz。
8)带内杂波:≤-60dBc。
9)二次、三次谐波:≤-50dBc。
10)输出信号电平稳定度:±0.5dB/24h。
11)相位噪声:-75dBc/Hz 1Hz
-85dBc/Hz 10Hz
-95dBc/Hz 100Hz
-105dBc/Hz 1kHz
-115dBc/Hz 10kHz
-120dBc/Hz 100kHz
(3)测距
为满足深空探测多种测距体制和国际合作的需要,同时兼顾我国目前测距体制,测距采取侧音测距、音码混合测距和伪码测距三种体制。具有双向测距、三向测距功能。
1)侧音测距
- 侧音波形:正弦波或方波。
- 主音频率:100kHz、500kHz(可选)。
- 次音频率:100kHz(主音500kHz时)、20kHz、4kHz、800Hz、160Hz、32Hz、8Hz、2Hz、0.5Hz,采用折叠音,低侧音折叠在16kHz上,最低侧音频率可设(8Hz、2Hz、0.5Hz)。
- 调制度:0.1~1.4rad,准确度±5%,步进0.01rad。
- 侧音发送方式:捕获时由高到低依次发送测距侧音,测量时只发主音。
- 侧音环路带宽(2BL):0.001~3Hz可选(每0.001Hz连续可变)。
- 测距精度:σR≤0.9m((S/Φ)载波=20dBHz,2BL=10Hz,(S/Φ)测距音=10dBHz,2BR=0.001Hz,R≤2×106km,主音频率500kHz)。
- 测距采样率:1Hz。
2)音码混合测距
- 测距主音:100kHz~1.5MHz可选(1Hz连续可变)。
- 测距码周期:2n/ft,n=0,1,…,20(ft为测距主音频率)。
- 调制方式:PCM/PM/PM(测距码对侧音进行PM调制,调制指数为45°或22.5°,已调侧音再对载波进行PM调制)。
- 侧音调制度:0.1~1.4rad,准确度±5%,步进0.01rad。
- 侧音环路带宽(2BL):0.001~3Hz可选(每0.001Hz连续可变)。
- 测距精度:σR≤0.9m((S/Φ)载波=20dBHz,2BL=10Hz,(S/Φ)测距音=10dBHz,2BR=0.01Hz,R≤2×106km,主音频率1MHz)。
- 测距采样率:1Hz。
3)伪码测距
- 工作门限:Pr/N0=10dBHz。
- 伪码捕获时间:Ts≤11s(测试条件:T4B码,Pr/N0=30dBHz,伪码速率2Mchip/s,多普勒范围±60Hz,多普勒变化率0.02Hz/s);Ts≤0.7s(测试条件:T2B码,Pr/N0=30dBHz,伪码速率2Mchip/s,多普勒范围±60Hz,多普勒变化率0.02Hz/s);Ts≤90s(测试条件:T2B码,Pr/N0=10dBHz,伪码速率2Mchip/s,多普勒范围±60Hz,多普勒变化率0.02Hz/s)。
- 测距随机误差:σR≤1m(测试条件:T4B码,Pr/N0=30dBHz,伪码速率2Mchip/s,多普勒范围±60Hz,多普勒变化率0.02Hz/s);σR≤1.5m(测试条件:T2B码,Pr/N0=30dBHz,伪码速率2Mchip/s,多普勒范围±60Hz,多普勒变化率0.02Hz/s);σR≤4.5m(测试条件:T4B码,Pr/N0=10dBHz,伪码速率2Mchip/s,多普勒范围±60Hz,多普勒变化率0.02Hz/s)。
- 深空站伪码测距数据的时标精度:<1μs(相对于协调世界时(UTC))。
(4)遥测
- 副载波波形:正弦波或方波。
- 调制方式:PCM/PSK/PM。
- 调制度:0.1~1.6rad。
- 副载波频率范围:1kHz~4MHz,1Hz连续可变。
- 码型:NRZ-L/M/S,Bi-Φ-L/M/S。
- 码速率:当遥测副载波为方波时,调制度为1.57rad,码速率(编码后)为100b/s~2Mb/s;其他调制度时,码速率(编码后)为1b/s~2Mb/s。
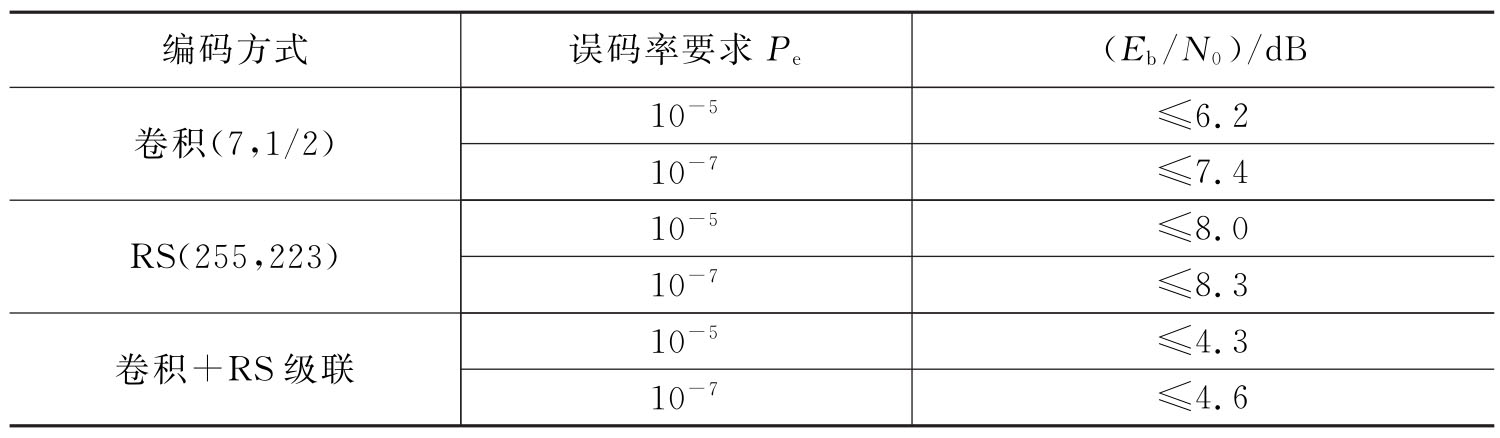
- 信道编码方式:采用CCSDS标准的(7, 1/2)卷积码、RS(255, 223)编码以及卷积与RS的级联码。具有符合CCSDS标准的Turbo码解码功能,并具有扩充低密度奇偶校验码(LDPC)解码能力。
- RS编译码交织深度:1~5深度可选。
- 解调误码率:不同编译码条件下的Eb/N0与误码率(含编译码及解调损失)要求见表5-2。
表5-2 遥测Eb/N0与误码率要求
(5)遥控
- 副载波波形:正弦波或方波。
- 副载波频率范围:100Hz~16kHz,1Hz连续可变。
- 调制方式:PCM/PSK/PM。
- 调制度:0.1~1.4rad,准确度±5%,步进0.01rad。
- 码型:NRZ-L/M/S,Bi-Φ-L。
- 码速率:(4000/2n)b/s,其中n=0,1,2,…,9。
- 指令发送时延:τ≤50ms。
- 小环检测结果置信度:0.9999。
- 纠错体制:前向纠错和大回路校验。
- 上行遥控具有加扰、BCH编码功能。
- 具有常发和突发两种工作模式:常发模式下一直发送遥控副载波,在无遥控指令时发送引导序列和空闲序列(101010……);突发模式下收到中心发遥控指令后,开始发送遥控副载波。突发模式下,基带本身不发送引导序列和空闲序列,引导序列和空闲序列由指令本身产生。
(6)跟踪
- 输入信号中心频率:70MHz;
- AGC控制范围:≥60dB;
- AGC控制精度:≤1dB;
- 和差通道隔离度:≥45dB;
- 具有自动校相功能;
- 自动校相精度(在全频带内):≤5°;
- 和、差通道幅度一致性:≤1.5dB;
- 和、差通道相位一致性:≤3°;
- 环路带宽:0.1Hz、1Hz、10Hz、100Hz、500Hz、1kHz、2kHz,分档可变,并具有自动变带宽能力。
(7)捕获时间
1)载波捕获时间:≤10s(当C/N0=20dBHz,载波捕获范围为±20kHz时);
≤5s(当C/N0=30dBHz,载波捕获范围为±50kHz时);
≤1s(当C/N0=40dBHz,载波捕获范围为±180kHz时)。
2)测距捕获时间(从信号到达天线口面开始计算):
≤10s(测距音S/N0≥50dBHz);
≤30s(测距音S/N0≥30dBHz);
≤100s(测距音S/N0≥10dBHz)。
(8)功能要求
- 具备同时完成左、右旋极化下行信号的捕获跟踪、合成、解调的能力。
- 具备自动判断卫星捕获上行信号(载波、伪码等),完成双向捕获的能力(判断条件待定)。
- 能完成遥控副载波和测距音对上行载波的调制,自检测试时可以实现遥测模拟信号的载波调制;遥控副载波、遥测模拟信号副载波、测距主音、测距次音的加调与去调可控,调制度分别可控,步进0.01rad,误差小于5%。
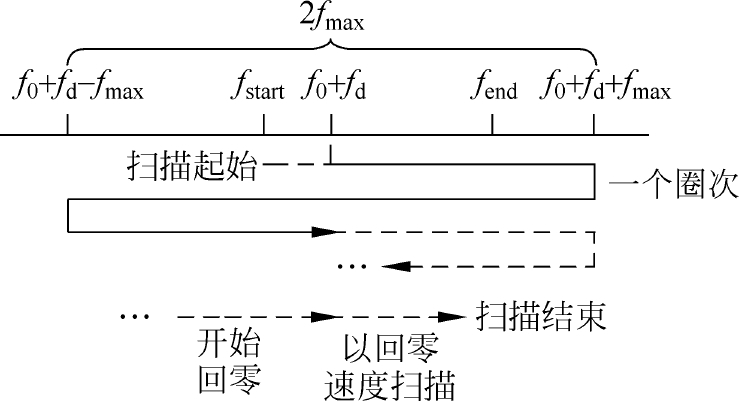
- 具有上行载波频率扫描/回零功能。回零应平滑完成,并有回零指示,扫描时,能支持遥控指令盲发。
- 能完成下行遥测信号的同步、解调,恢复基带PCM信号,恢复遥测帧。对外提供帧同步信号接口用于遥测测试,具有遥测解调时延测试功能。
- 能逐帧传输带时标的全帧遥测数据,时标精度0.1ms,时标为帧同步码组后第1个字节最高位前沿时刻。
- 具有遥测误码率、误帧率统计功能,可以实时挑波道进行误码率、误帧率统计。
- 具有符合CCSDS标准的Turbo码解码功能,并具有扩充LDPC码解码能力。
- 具有遥控副载波输出接口。
- 能够测试遥控发令时延和时间符合发令的时间符合精度。
- 做遥控自环比对和小环比对时,无须输入关于遥控指令的先验信息。
- 能完成载波多普勒频率的提取,实现目标径向速度的测量。测速数据时标为积分时间终点时刻,时标精度0.1ms。
- 具有输出稳定侧音功能,供调制度定标测试。
- 具有输出未调遥控副载波功能,供调制度定标测试。
- 能实时存储遥控发令信息,包括发令时间、发送数据、自环/小环返回数据、自环/小环比对结果,存储数据至少保留1个月,并能按任务、时间等信息进行检索、浏览、打印,进行该项操作必须要加权限限制。
- 能实时存储遥测数据,并能按任务、时间等信息进行检索、浏览、打印(存储数据量待定)。
- 能实时存储距离、速度数据,可对存储数据进行精度统计,存储数据至少保留1个月,并能按任务、时间等信息进行检索、浏览、打印。
- 具有载波相位测速功能。
- 具有遥测模拟源,能产生模拟信号,数据可以是伪随机码、固定码、台阶码等,也可以逐波道任意设定,码型、码速率、帧格式、调制方式及参数可编程设定。
- 可对外提供模拟帧同步信号接口用于测试。
- 可对外来数据进行调制,码型、码速率、帧格式、调制方式及参数可编程设定。
- 具有中频噪声源,用于中频闭环自检,遥测、数传误码率测试,载波、距离捕获性能测试,测距、测速精度测试,AGC标定(暂定中频AGC标定)等。
- 噪声带宽应与跟踪、遥测和遥控(TT&C)信号输入带宽相当。
- 噪声功率应与TT&C信道噪声功率相当,并可调节,满足指标测试、AGC标定等的要求。
数传
(1)中频接收
- 输入信号中心频率:70MHz。
- 输入信号电平:-50~0dBm。
- 动态特性:同测控基带分机。
- 下行多普勒预置范围:同测控基带分机。
- 环路带宽:0.1Hz、1Hz、10Hz、50Hz、200Hz、500Hz、1kHz、2kHz分档可变,并具有自动变带宽能力(同测控基带分机)。
- AGC控制范围:≥50dB。
- AGC控制精度:≤1dB。
- AGC时间常数:10ms、100ms、1000ms、10000ms(同测控基带分机)。
(2)数据解调单元
- 调制方式:PCM/PM、PCM/BPSK、PCM/QPSK、PCM/OQPSK。
- 码型:NRZ-L/M/S、Bi-Φ-L/M/S。
- 信道编码方式:采用CCSDS标准的(7,1/2)卷积码、RS(255,223)编码以及卷积与RS的级联码。具有符合CCSDS标准的Turbo码解码功能,并具有扩充LDPC码解码能力(具体编码要求同遥测信道编码方式)。
- 数据调制方式与信息速率(编码后)的对应关系:PCM/PM/Bi-Φ,1kb/s~5Mb/s;PCM/PM/NRZ,1kb/s~10Mb/s;BPSK/Bi-Φ,100b/s~5Mb/s;BPSK/NRZ,100b/s~10Mb/s;QPSK、OQPSK,20kb/s~20Mb/s。
- 解调误码率:不同编译码条件下的Eb/N0与误码率(含编译码及解调损失)要求同表5-2。
(3)数传跟踪单元
指标同测控跟踪单元。
(4)功能要求
- 具有同时完成左、右旋极化信号的捕获跟踪、合成,解调数据输出功能,同时输出载波AGC电压、载波锁定指示信号(输出码同步、帧同步锁定指示信号待定)。
- 具有AGC曲线自动标定功能(是否需具备该功能待定)。
- 具有误码率、误帧率统计功能(是否具备实时挑波道进行误码率、误帧率统计功能待定)。
- 具有符合CCSDS标准的Turbo码解码功能,并可扩充LDPC码解码能力。
- 可实时存储数据,并能按任务、时间等信息进行检索、浏览、打印(存储数据量待定)。
- 具有模拟源,能产生模拟信号,数据可以是伪随机码、固定码、台阶码等,也可以逐波道任意设定,码型、码速率、帧格式、调制方式及参数可编程设定。
- 对外提供模拟帧同步信号接口用于测试。