调制器
调制器(含遥控、小环接收、遥测模拟源、测距信号产生等)。上行调制器硬件包括调制器信号处理板(前板)、接口板(后板,含中频信道盒),完成遥控、小环接收、遥测模拟源、测距信号产生、中频调制和白噪声产生等功能。调制器原理框图如图5-18所示。
图中,中频信号调制、白噪声滤波放大、功率调节、信号+噪声、功分器等电路在中频信道盒中,信道盒安装于后板;小环接收机通道的滤波放大、A/D变换器,视频卫模接口的D/A变换器、滤波放大电路也安装在后板上;其余电路在信号处理板上实现。信号处理板外观见图5-10。
遥控模块
遥控模块由遥控发送模块和小环接收模块组成。
遥控发送模块由码型变换、副载波调制器、并/串变换和CPCI总线接口等组成,其组成框图见图5-19。
小环接收模块可接收来自射频闭环的70MHz信号(小环比对)送入A/D变换器采样,数据解调后,将遥控信息通过CPCI总线传输给监控和数据处理计算机,监控和数据处理软件完成比对并显示结果。小环接收机还具备自环功能,直接接收遥控副载波调制器输出的遥控副载波,实现遥控指令的比对。其原理框图见图5-20。
图5-17 跟踪接收机中频信道盒原理框图
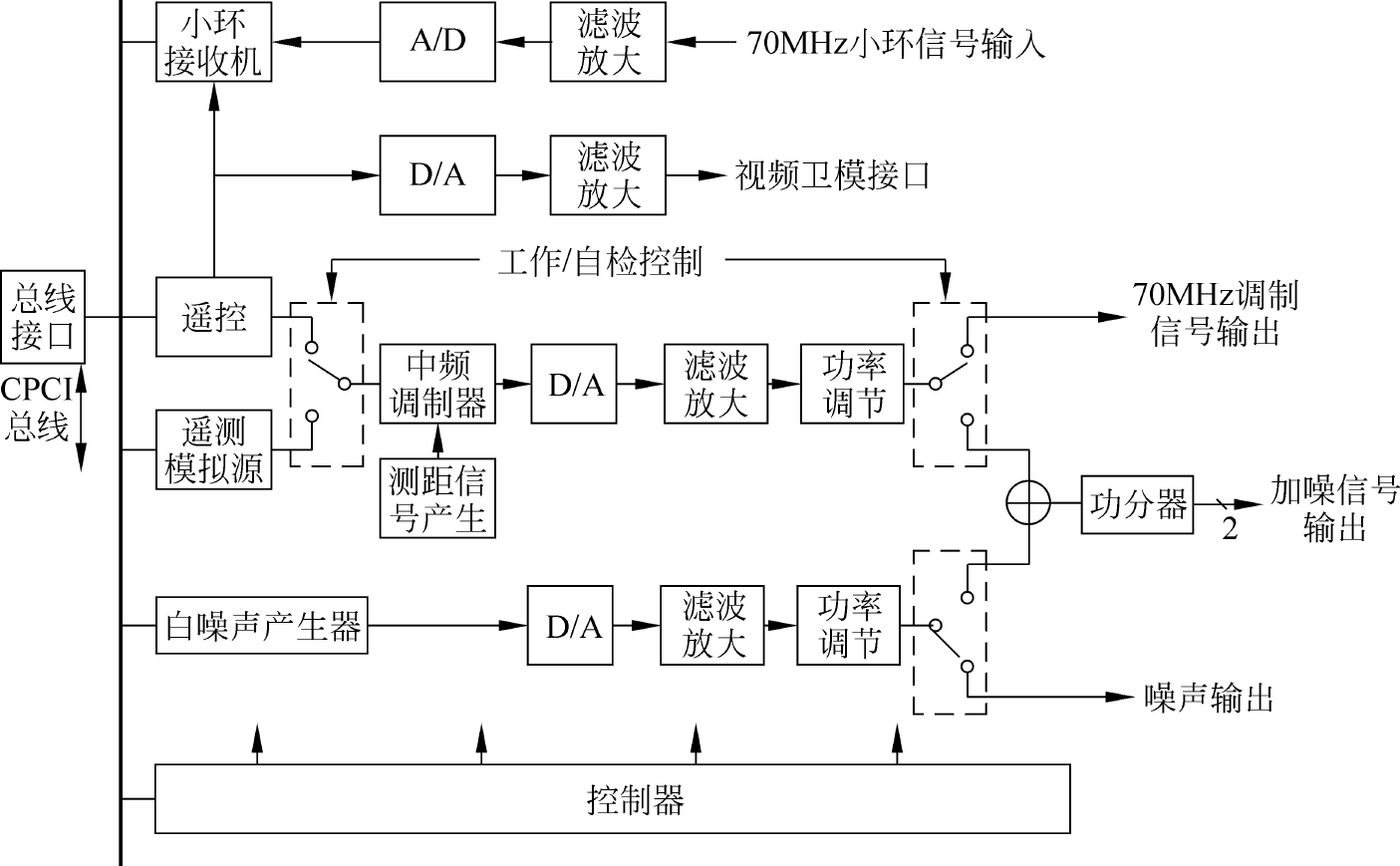
图5-18 调制器原理框图

图5-19 遥控发送模块组成框图
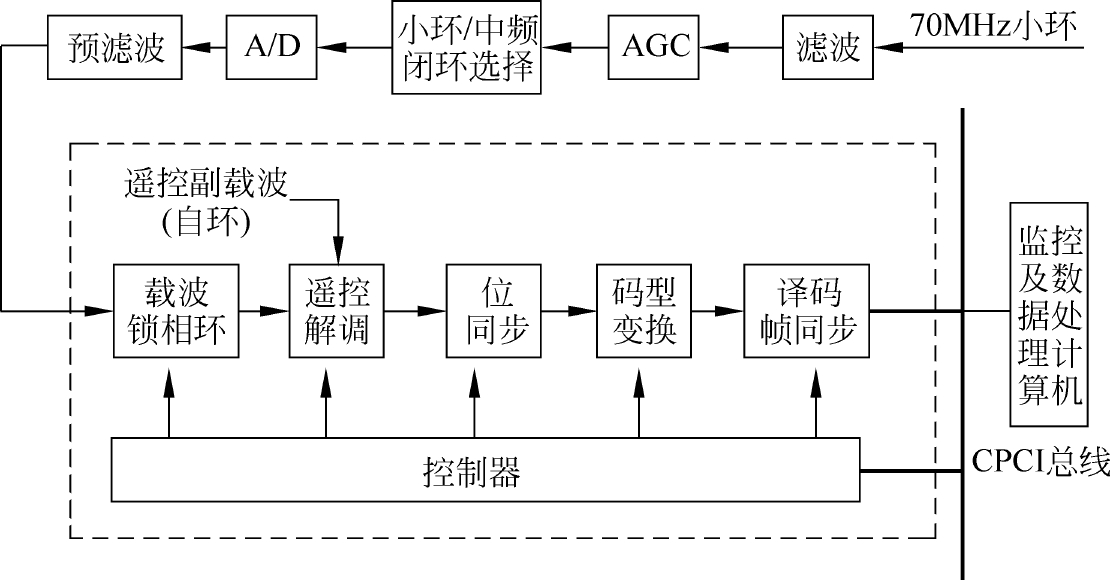
图5-20 小环接收模块原理框图
遥控指令由数据处理中心通过以太网送基带计算机,在基带计算机中进行遥控指令合法性校验。本地也具有遥控指令生成的能力。指令码经CPCI数据总线送入遥控模块,经并变串、码型变换后,由基带计算机控制进行副载波调制,然后完成PM调制,输出的副载波分一路由副载波调制器解调后,经过控制器及CPCI总线接口送回计算机,与发码比较完成自环比对。在小环比对时,小环中频接收机完成载波解调后,解调出副载波送副载波调制器,恢复出遥控信息码,并通过CPCI总线直接送给基带计算机,与发码比较完成小环比对。遥控模块具有时间符合发令的功能,适应PCM遥控标准和CCSDS的数据格式标准。遥控终端用大规模数字器件实现,利用FPGA完成码钟产生、副载波调制、自环解调和小环解调等功能,根据基带监控的控制,实时确定副载波频率、码速率、码型等参数。
遥测模拟源
遥测模拟源接收基带计算机通过CPCI总线注入的遥测模拟数据,按要求的码速率产生串行码流,再经过编码及码型变换,遥测数据完成对副载波的BPSK调制,产生遥测副载波调制信号,送中频调制器。遥测数据钟、副载波频率由基带监控进行控制。
其原理框图见图5-21。
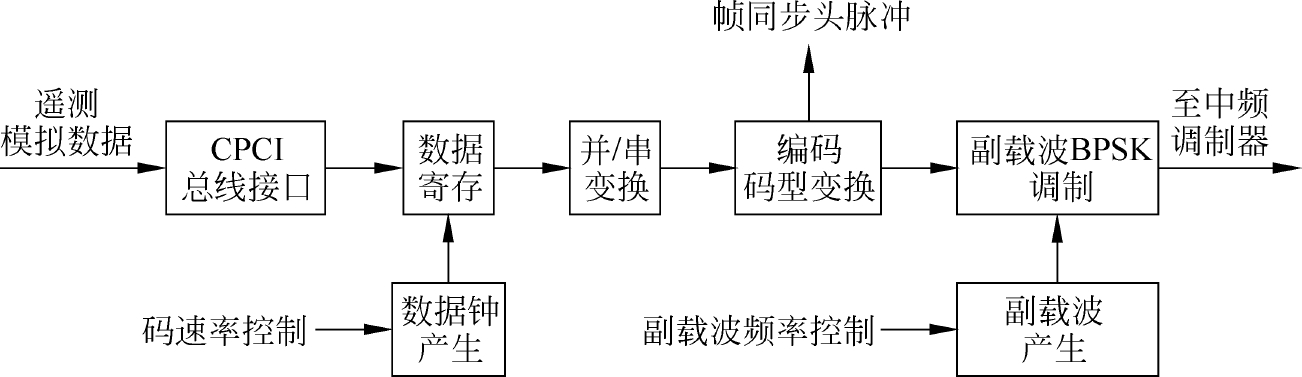
图5-21 遥测模拟源原理框图
测距信号产生模块
测距信号产生模块按信号形式分为两种情况。
纯侧音测距时(原理见图5-22),产生500kHz(或100kHz)主侧音,由500kHz主侧音经5分频产生100kHz次侧音,再5分频产生20kHz次侧音,再5分频产生4kHz次侧音(实际发送20kHz与4kHz混频后的16kHz次侧音),再5分频产生800Hz次侧音(实际发送16kHz与800Hz混频后的16.8kHz次侧音),再5分频产生160Hz次侧音(实际发送16kHz与160Hz混频后的16.16kHz次侧音),再5分频产生32Hz次侧音(实际发送16kHz与32Hz混频后的16.032kHz次侧音),再4分频产生8Hz次侧音(实际发送16kHz与8Hz混频后的16.008kHz次侧音),再4分频产生2Hz次侧音(实际发送16kHz与2Hz混频后的16.002kHz次侧音),再4分频产生0.5Hz次侧音(实际发送16kHz与0.5Hz混频后的16.0005kHz次侧音)。距离捕获时,主音及各次音送中频调制器顺序发送,距离捕获完成后发送主音进行测距。
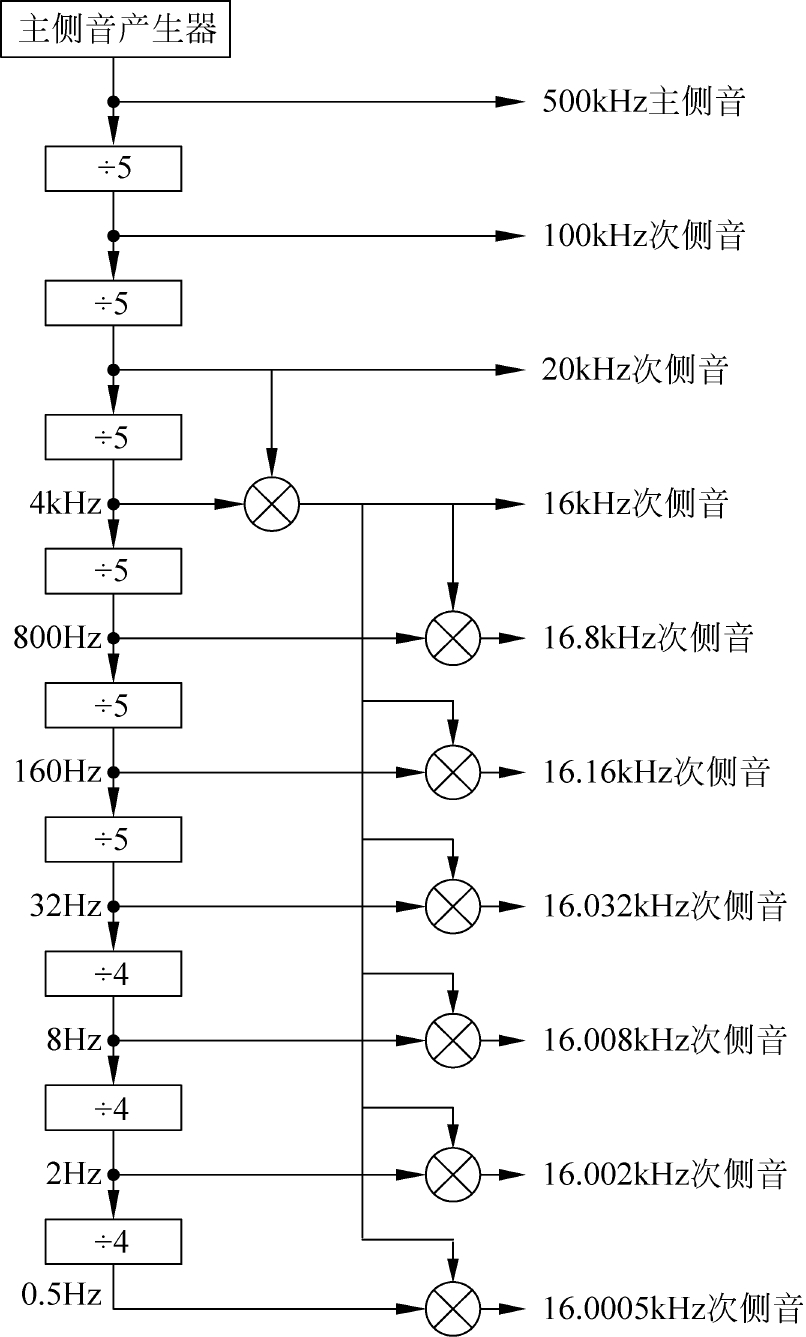
图5-22 纯侧音测距信号产生器原理框图
主侧音+序列码测距时(原理见图5-23),产生100kHz~1.5MHz任选主侧音,由主侧音2分频信号与主侧音异或,产生第1级序列码r1(t)=Q0⊕Q1;再2分频、异或产生第2级序列码r2(t)=Q0⊕Q1⊕Q2;……;直至第20级序列码。距离捕获时,主侧音及各序列码送中频调制器顺序发送,距离捕获完成后发送主音进行测距。
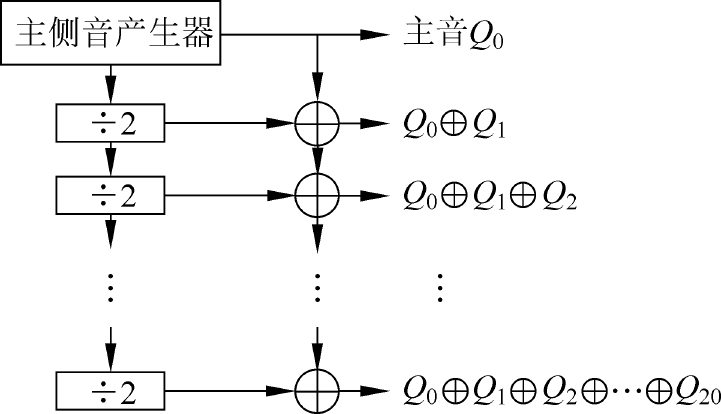
图5-23 主侧音+序列码测距信号产生器原理框图
中频调制器
中频调制器原理框图如图5-24所示。基带设备处于工作状态时,中频调制器完成遥控已调副载波信号对中频载波的PM调制;基带设备处于自检状态时,中频调制器完成遥测已调副载波信号对中频载波的PM调制。遥控(或遥测模拟源)信号和测距信号相加后送入数字移相器完成调相,直接产生70MHz中频调制的数字信号,通过D/A变换器和滤波器、放大器后输出。中频调制器以系统频标为参考产生各种信号和DDS时钟信号。由数字电路完成信号的调相,可以得到很好的调制线性度,调制指数可以任意调节。
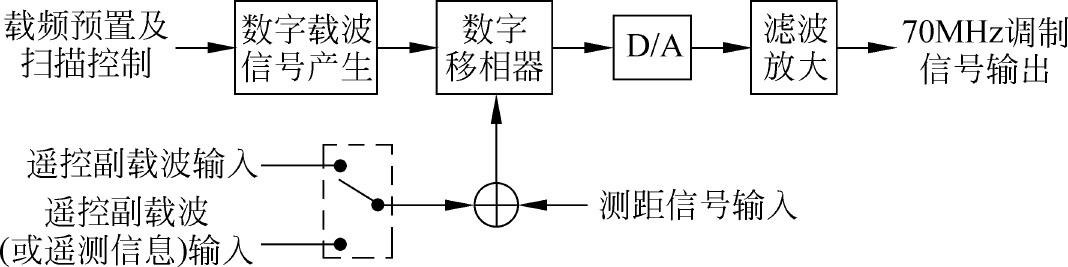
图5-24 中频调制器原理框图
中频调制器的载波频率和载频扫描等参数由计算机控制调节,控制命令通过CPCI总线送入。可实现上行多普勒预置和频率扫描,以帮助应答机捕获上行载波。
接收机
接收机(含载波接收机、极化合成、遥测、测距、测速等)。接收机由接收机信号处理板、接收机接口板(含中频信道盒)构成,完成载波捕获跟踪和中频极化合成,遥测、测距信号解调,速度、距离数据提取等功能。接收机直接在70MHz中频上进行数字化,输入口设置一个开关,基带设备处于工作状态时,接收下行信道送来的70MHz和中频信号;当基带处于自检或测试状态时,输入调制器产生的下行模拟信号,完成基带设备的自检或自动测试。
载波接收机(双旋向极化合成)
载波接收机原理框图如图5-25所示(图中表示的是有极化合成的情况,不合成的情况省略),接收70MHz左、右旋和路下行中频信号。对接收机捕获灵敏度要求为:20dBHz(双边环路带宽10Hz),无多普勒预报;0(双边环路带宽0.1Hz),加多普勒预报。输入中频信道分为两种情况:当接收信号(S/Φ)载波≥20dBHz时,输入中频信号经带宽30MHz滤波器(考虑多普勒频率±2.4MHz、最大副载波频率4MHz、最大遥测数据速率2Mb/s、随扫范围±1.2MHz)、AGC放大和A/D采样后进入中频数字锁相环;当接收信号0≤(S/Φ)载波≤20dBHz时,输入中频信号经带宽5.4MHz或500kHz滤波器(考虑多普勒频率±2.4MHz、副载波频率+遥测数据速率+随扫范围不超过±250kHz)、AGC放大和A/D采样后进入中频数字锁相环。
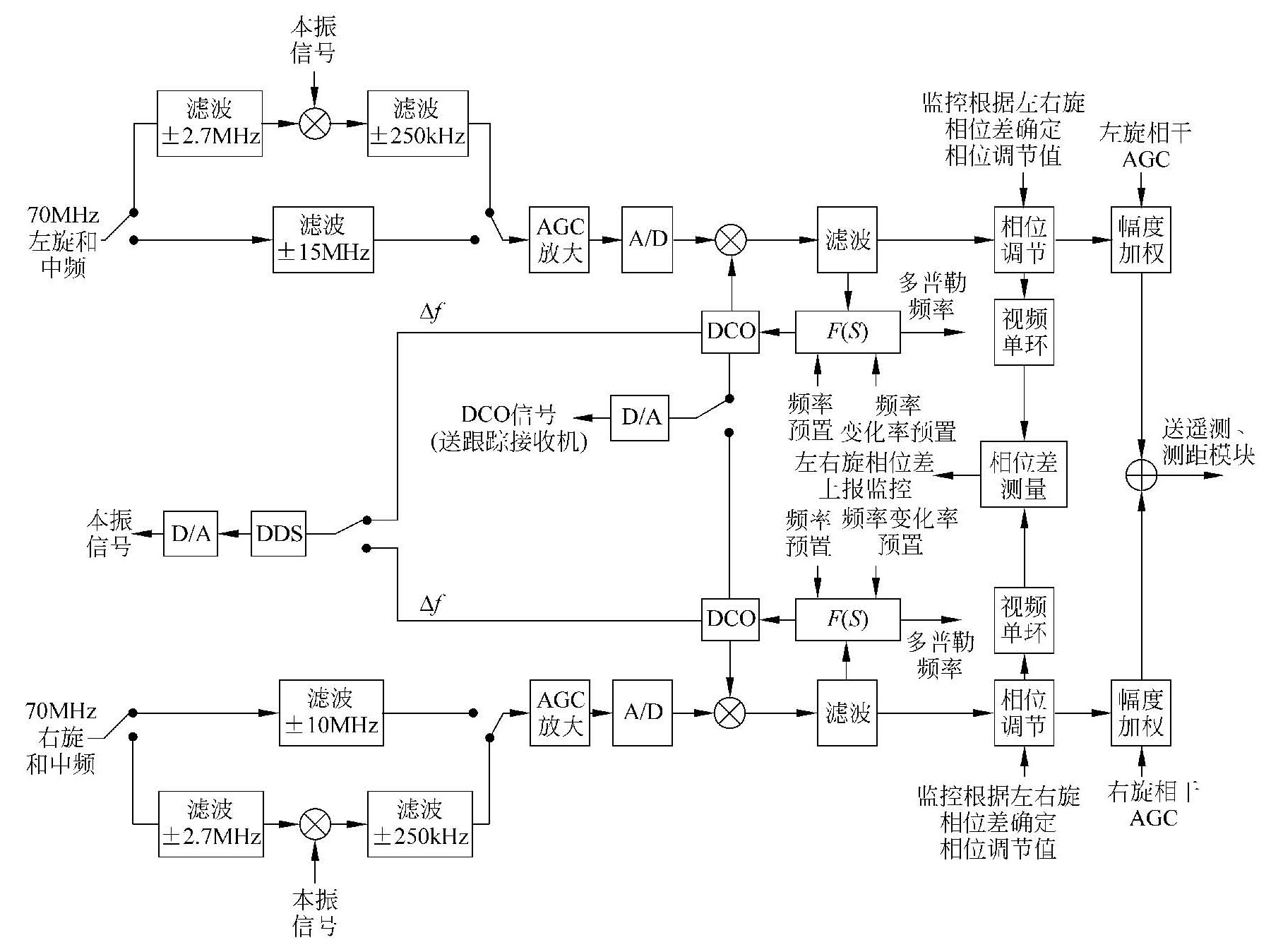
图5-25 载波接收机原理框图
载波接收机为具有极化合成功能的接收机。接收机有2个锁相环,分别跟踪2个极化支路载波,当2个环路锁定后,解调出基带信号经相位(时延)调节和幅度加权后合成。幅度加权系数根据左、右旋支路的相干AGC电压提取,遵循最大信噪比合成原则。解调测距基带信号可选择极化合成和不合成两种方式。
极化合成后解调得到测距、遥测副载波信号,送到测距、遥测单元进行下一步处理。
为满足动态性能要求,由频率快速捕获单元完成输入信号频率和频率变化率测量后,实时将测量结果送载波锁相环,辅助载波环捕获跟踪。环路锁定后,从环路滤波器提取多普勒频率上报基带计算机,完成速度值计算。
遥测模块
遥测模块从主接收机得到遥测副载波信号,副载波解调器跟踪副载波,解调出遥测数据,经位同步、译码、帧同步后将数据打包,通过CPCI总线,将数据上报基带监控和数据处理计算机(见图5-26)。

图5-26 遥测模块原理框图
DSF1遥测模块与以往测控系统的主要区别为:在极低信噪比下,往往采用很低的遥测数据速率(本系统要求最低遥测数据速率为1b/s),这时遥测副载波解调器和数据位同步会有不同。下面主要针对这两点进行分析。
遥测信号调制方式为PCM/PSK/PM,考虑信号捕获灵敏度(S/Φ)载波=20dBHz和遥测解调门限Eb/N0=2dB,当遥测数据速率(编码后)为1b/s时,遥测副载波调制度可以为0.18rad,副载波信号C/N0=2dBHz。
根据JPL设计手册建议的副载波环路信噪比,当副载波为方波时,(S/N)L≥20dB;当副载波为正弦波时,(S/N)L≥17dB。那么环路带宽应有BL≤0.015Hz。
考虑遥测单元的动态性能,根据任务书指标,目标动态为:S频段最大载波多普勒频率为600kHz,最大载波多普勒频率变化率为200Hz/s;X频段最大载波多普勒频率为2400kHz,最大载波多普勒频率变化率不大于800Hz/s。假设遥测数据速率为1b/s时,采用1kHz的遥测副载波,则最大副载波多普勒频率为0.3Hz,最大副载波多普勒变化率为0.0001Hz/s。
对于二阶锁相环:

式中 BL——单边环路带宽;
ωn——环路自然角频率(rad/s);
ξ——阻尼系数,常取ξ=0.707。
所以有BL=0.53ωn。
当输入信号的频率变化率 时,环路锁定概率大于90%,所以当
时,环路锁定概率大于90%,所以当![]() 时,二阶环可以适应动态要求。当最大副载波多普勒变化率为0.0001Hz/s时,BL须大于0.019Hz。
时,二阶环可以适应动态要求。当最大副载波多普勒变化率为0.0001Hz/s时,BL须大于0.019Hz。
前面已经分析,副载波环路带宽应不大于0.015Hz,所以,采用三阶锁相环完成遥测数据解调。
为得到好的解调误码性能,位同步环路带宽取信息速率的3‰,最窄时会达到0.003Hz,所以要求遥测源的频率准确度至少优于0.0001Hz。在基带设备中,遥测模拟源的数据钟采用DDS方式产生,这时要求DDS相位累加器的位数必须足够多。当采用300MHz系统钟时,DDS相位累加器的位数至少42位以上。
测距模块
按信号形式,测距分为三种情况:纯侧音测距、音码混合测距和伪码测距。
一、纯侧音测距
纯侧音测距采用以下侧音组:500kHz、100kHz、20kHz、4kHz、800Hz、160Hz、32Hz、8Hz、2Hz、0.5Hz,以500kHz或100kHz作为主音,其余作为次音,完成距离测量。实际发送侧音为:500kHz、100kHz、20kHz、16kHz、16.8kHz、16.16kHz、16.32kHz、16.008Hz、16.002Hz、16.0005Hz。
各侧音顺序发送,首先发500kHz主音,接收端采用主音环完成主音捕获跟踪。主音锁定后,由高至低发送次音。次音捕获采用数字相关器相位估值法,利用双通道相关原理,在强噪声中直接测量输入次音与本地次音间的相位差,据此调整本地分频链,完成次侧音提取和次侧音相位匹配。正交双通道数字相关的原理框图如图5-27所示。
在求得相位差φ后,再判断φ为360°/a(a为相邻侧音间的分频比)的几倍,就可确定其落入哪一个相位段,根据相位段号对分频链进行相位调整,完成一个次音的匹配。
对DSF1除要考虑低信噪比的影响,还必须考虑信号时延带来的影响。深空系统信号传输时延较长,而且目标距离变化较大,使信号时延变化较大,时延难以确定。为了缩短捕获时间,各侧音根据接收相关处理时间,确定发射时间及各侧音的发射间隔,顺序发送。假设主音的发射时间为T1,各次音的发射时间为T2。主音采用锁相环捕获跟踪,捕获时间较长;次音采用相关器提取,捕获时间较短。所以,主音发射时间T1大于次音发射时间T2。为了使接收端能区分各侧音信号,每两个侧音之间留一段间隔时间。
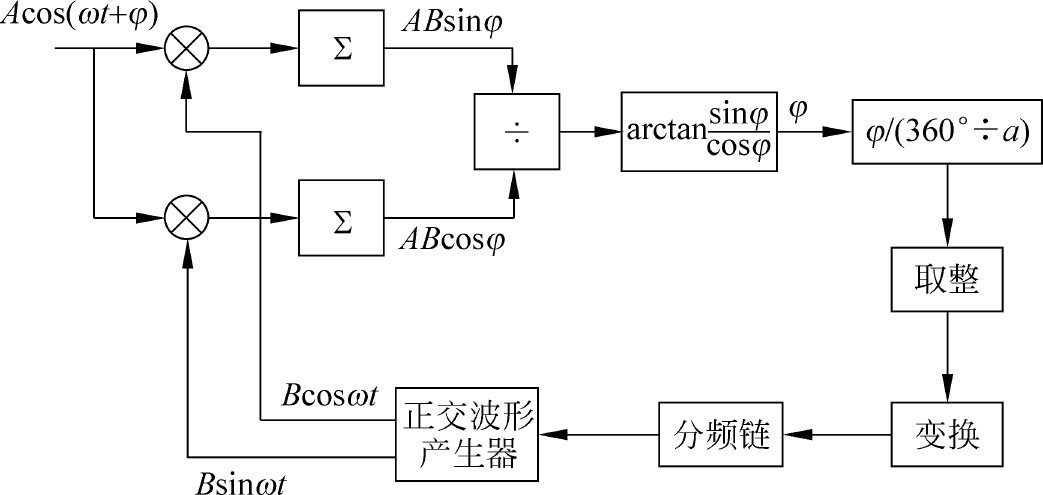
图5-27 正交双通道数字相关原理框图
距离信号的捕获过程:先发主音,主音锁定后,再发第1次侧音(最高次音),已锁定的主音经过分频链分频产生本地第1次侧音,次侧音相关器测量第1次侧音的接收信号与本地信号之间的相位差,由相位差求出分频链状态偏移量,通过匹配控制电路改变分频链初态,使本地第1次侧音与接收信号同相,第1次侧音就完成了匹配;再发第2次侧音,由第1次侧音经分频链产生本地第2次侧音,完成第2次侧音的相位匹配;……如此完成各次音的相位匹配后,分频链输出的最低次侧音与接收信号同相,这时,发端最低次侧音与分频链最低次侧音前沿间的时延等于电波空间传输时延,测量这个时延就可以求出目标距离。
由于本地各次侧音是由锁定以后的主音分频产生的,所以,测距精度取决于主音环的测相误差。而次侧音相关器则决定了测距的错大数概率:如果次侧音的测相误差过大,则会导致距离捕获时匹配不正确,使距离测量错大数,所以,相关器必须根据接收信噪比选择恰当的积分时间,以保证正确的相位匹配。纯侧音测距模块框图见图5-28。
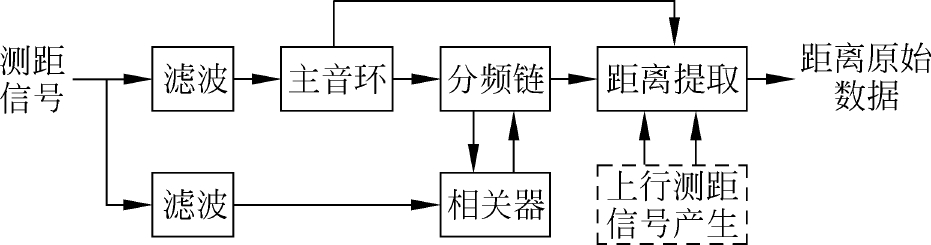
图5-28 纯侧音测距模块原理框图
二、音码混合测距
音码混合测距信号的序列码对主音PM调制后,再将主音对载波PM调制。距离捕获过程与纯侧音测距相似:先发主音,主音锁定后,由r1(t)~rn(t)顺序发送各级序列码;测距单元将本地序列码与接收序列码相关,根据相关值调整分频链相位,完成序列码捕获;解模糊码rn(t)捕获后,测量发射码rn(t)与本地复制码rn(t)的时延,完成距离原始数据提取(见图5-29)。由于本地复制码由主音分频、逻辑组合产生,所以时延测量值抖动由主音环确定,即测距精度由主音环确定。
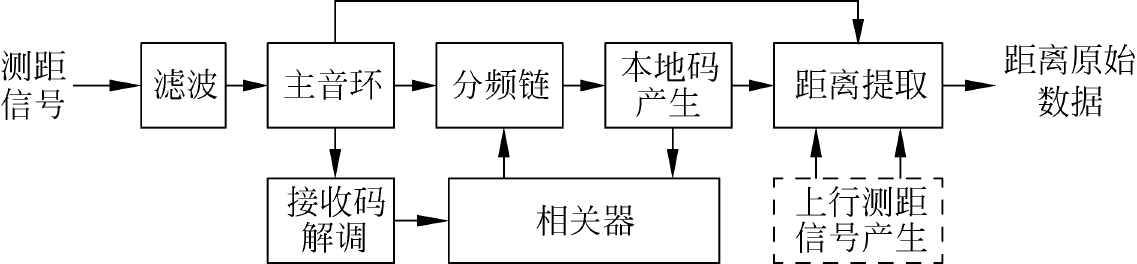
图5-29 主侧音+序列码测距模块原理框图
同样,DSF1除了要考虑低信噪比的影响外,还必须考虑信号时延带来的影响。各序列码根据接收相关处理时间,确定发射时间及各序列码的发射间隔,顺序发送。假设主侧音的发射时间为T1,各序列码的发射时间为T2。主侧音采用锁相环捕获跟踪,捕获时间较长;序列码采用相关器提取,捕获时间较短。所以,主侧音发射时间T1大于序列码发射时间T2。每两个序列码之间留一段间隔时间作为保护。
三向测距时,在本站产生一个与发射站同步的发侧音信号,以此为参考,测量接收信号与该信号的时延,得到三向距离。该参考信号与发射站的同步精度靠系统时间同步精度保证。
三、伪码测距
伪码测距处理部分结构框图见图5-30。
伪码测距信号处理包含以下功能模块:
- Chip跟踪环(CTL),用于测距时钟恢复,通过匹配滤波产生同步信号,并输出1位量化的码序列;
- 6个滑动码相关器并行处理,完成PN码相位捕获、相关器控制与积分判决管理;
- 下行码再生功能模块。
每一个相关器对成员序列Ci的所有Li个可能的相位进行串行搜索。对一定时间长度下的Li个串行积分结果进行基于最大搜索策略的比较,得到的最大值对应相关峰值与成员序列Ci的相位位置。也可以采用相对简单的基于门限比较策略的方法。
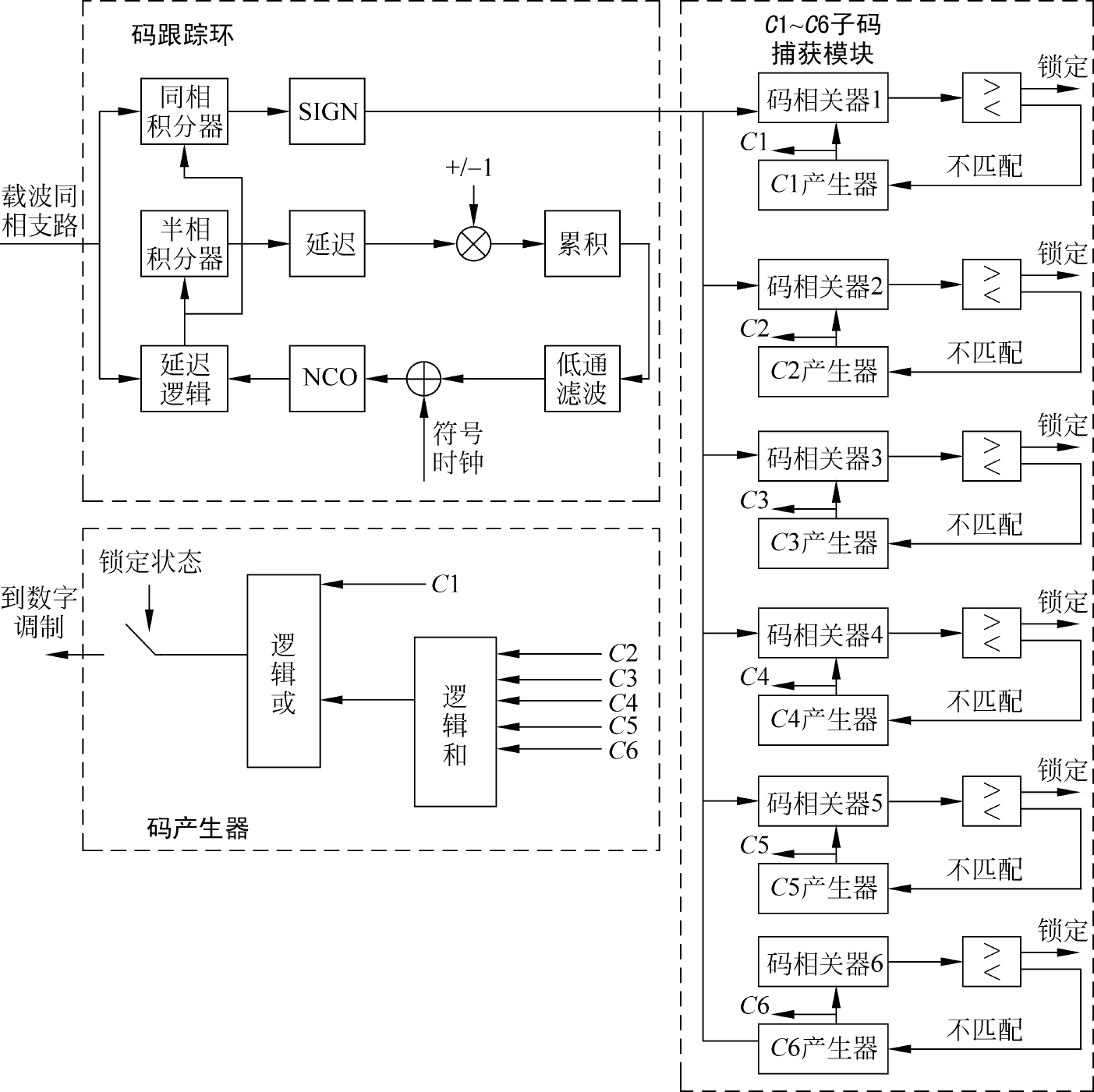
图5-30 伪码测距处理部分结构框图
频率捕获单元
考虑门限情况:需在C/N0=20dBHz的信噪比下,完成对大动态信号的捕获。
由于接收信号信噪比低,接收机必须采用超窄带锁相环,在C/N0=20dBHz的信噪比下,锁相环捕获带宽须小于10Hz。在多普勒频率和多普勒频率变化率都比较大的情况下,为使超窄带锁相环能够锁定,必须对锁相环的频率和频率变化率进行补偿。仿真结果表明,BL=10Hz时,频率补偿误差小于或等于±5Hz,频率变化率补偿误差小于或等于±25Hz/s,锁相环才能捕获。本单元的作用就是完成对接收信号的频率和频率变化率测量,将测量结果实时送接收机锁相环,引导锁相环锁定。
采用fd及![]() 二维并行搜索方案,实现框图见图5-31。
二维并行搜索方案,实现框图见图5-31。
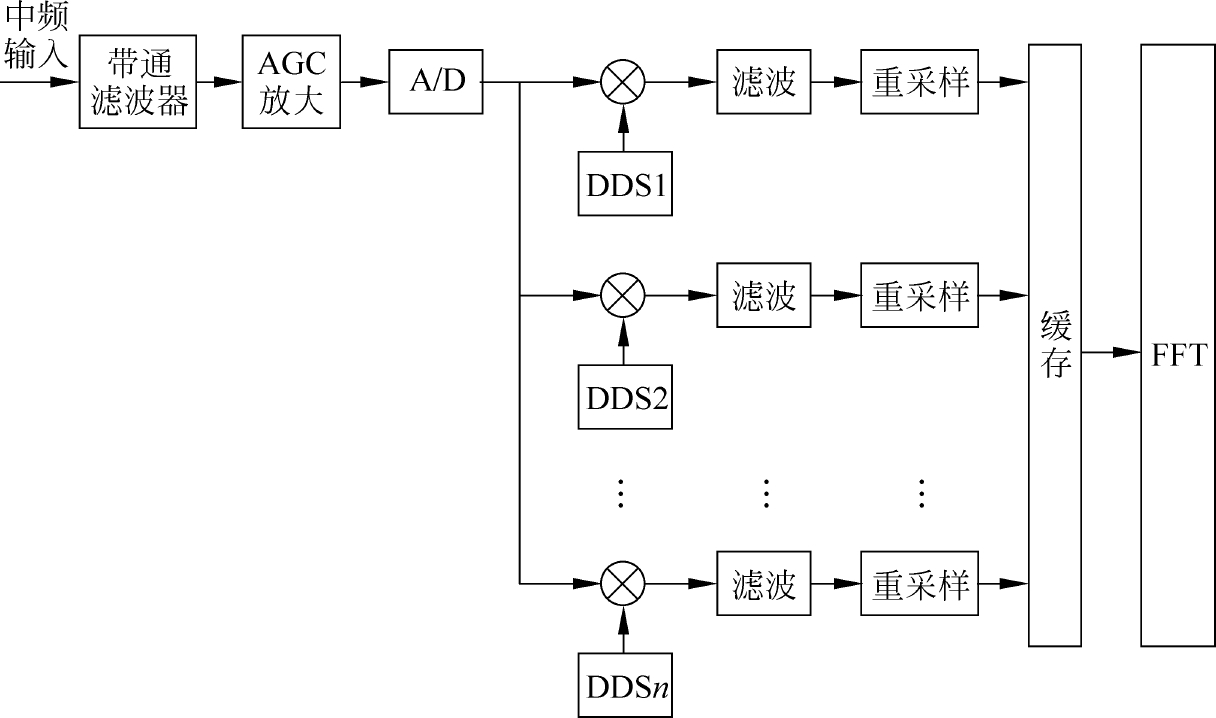
图5-31 频率捕获单元原理框图
测量时,输入信号经A/D变换后进入数字下变频、滤波、重采样组,通过将数字下变频器的本振信号产生器DDS1~DDSn设置为不同频率和频率变化率,实现对频差信号的分段滤波、采样,分别对每个频率段的样本值作FFT处理,完成载频和载频变化率搜索。在C/N0=20dBHz的信噪比下,为了达到90%以上的检测概率,FFT的分析带宽须小于3Hz。考虑硬件资源的可实现性,采用16384点FFT,则重采样钟定为40kHz,这样,每一段可以对±10kHz的多普勒范围进行搜索。在C/N0=20dBHz的信噪比下,为使采样时信号频率变化不超过2.75倍FFT分辨率单位(仿真显示,这时频谱峰值下降较小),多普勒变化率须按16Hz/s分槽。将本振DDS设置成不同的频率变化率,当本振频率变化率与输入信号的频率变化率基本一致时,相应变频支路输出频差基本恒定,经FFT处理,可以获得该频差,并且由该支路设置的DDS频率变化率可以得到接收信号的频率变化率,从而实现fd及![]() 的二维搜索。
的二维搜索。
频率捕获单元需具有接收信号弱时捕获时间长,接收信号强时捕获时间短的能力。信号每增强3dB,捕获时间减半。信号强弱参数根据任务已知信息通过监控的参数控制选择。减少捕获时间的具体实现方法为:改变FFT处理采样时钟,最低接收信噪比每增加3dB,采样时钟提高1倍,使得采样时间减半,同时频率分槽数减半,所以捕获时间缩短。