本系统在S、X两个频段均配置双通道单脉冲跟踪接收机,实现地面天线对空间目标的精密跟踪,送出测角数据。
DSF1天馈网络采用波束波导射频传输方案,波束波导镜面随动天线的方位、俯仰运动,单脉冲馈源输出的和差信号相对相位也对应变化,因此要求天线控制单元(ACU)对基带送出的误差电压进行波束波导坐标转换,以满足天线跟踪的需求。
双通道单脉冲测角原理
在DSF1中主要采用了双通道单脉冲体制。为了简化系统,将方位误差信号和俯仰误差信号用正交相位复用方法合成一个信号,成为双通道单脉冲体制,如图1-12所示。这时图1-12中的EΔE和EΔA合成EΔ。
图中,KΣ和φΣ为和通道的增益和相位移,KΔ和φΔ为差通道的增益和相位移,它们之间用和通道的自动增益控制(AGC)进行幅度归一化,然后用2个相位相差90°的相参乘法器(常用鉴相器(PD))实现正交相位分路将方位误差信号和俯仰信号解调出来,乘法器的参考信号用锁相环与和路信号相干。其数学表示式如下。
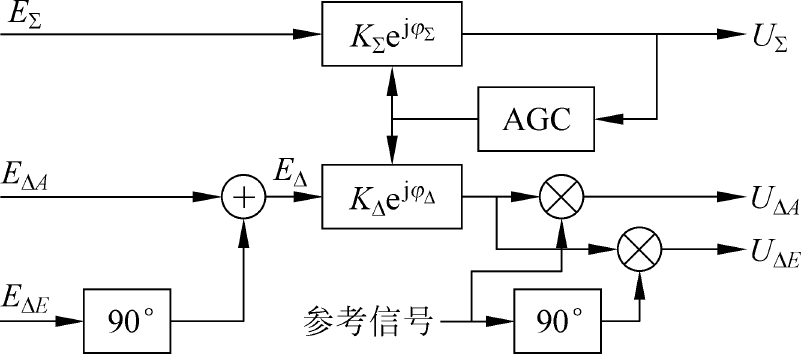
图1-12 双通道单脉冲原理图
设和路信号幅度为1,双通道单脉冲:

式中 θA,θE——方位偏差角和俯仰偏差角;
μ——天线的归一化角误差斜率;
θ,φ——差路合成载波幅度系数和相位, ,φ=tan(θE/θA)。
,φ=tan(θE/θA)。
经各自的通道放大和AGC归一化后:

式中 Δφ——和差信号相位不一致性,Δφ=φΣ-φΔ。
参考信号与差路信号UΔ相乘经低通滤波后的输出为

上式第一项为有用的方位误差输出信号,当存在Δφ时存在第二项,它与俯仰角度差有关,使方位误差信号中包含了俯仰误差信号,即形成了俯仰对方位的交叉耦合,它会使天线跟踪目标时产生螺旋形跟踪,导致收敛速度慢、动态跟踪性能差。
参考信号移相90°后的cos(ω0t+Δφ+π/2)与差路信号相乘并经低通滤波后输出为

上式第一项为有用的俯仰误差输出信号,当存在和、差相移不一致时,也会产生第二项中的方位对俯仰的交叉耦合信号。
在和、差相位一致性校准准确时,双通道单脉冲和三通道单脉冲有类似的测角精度,而且接收系统简化,多模馈源形成和差信号也较简单,所以大多数测控中都采用双通道单脉冲体制。
深空跟踪系统的坐标变换
DSF1采用波束波导馈电的卡塞格伦天线,波束波导镜面随动天线方位与俯仰运动,进而引起和差路跟踪射频的相对相位变化,因此在角误差处理时需要进行波束波导坐标变换。
单脉冲馈源的TE21模耦合器工作时,跟踪接收机最终输出的角误差电压经坐标变换后能正确反映空间目标在天线坐标系中的角位置,通过正割补偿算法将天线坐标系中的角度转换到角编码器输出的地角坐标系中。空间目标在天线坐标系和地角坐标系中的位置关系如图1-13所示。
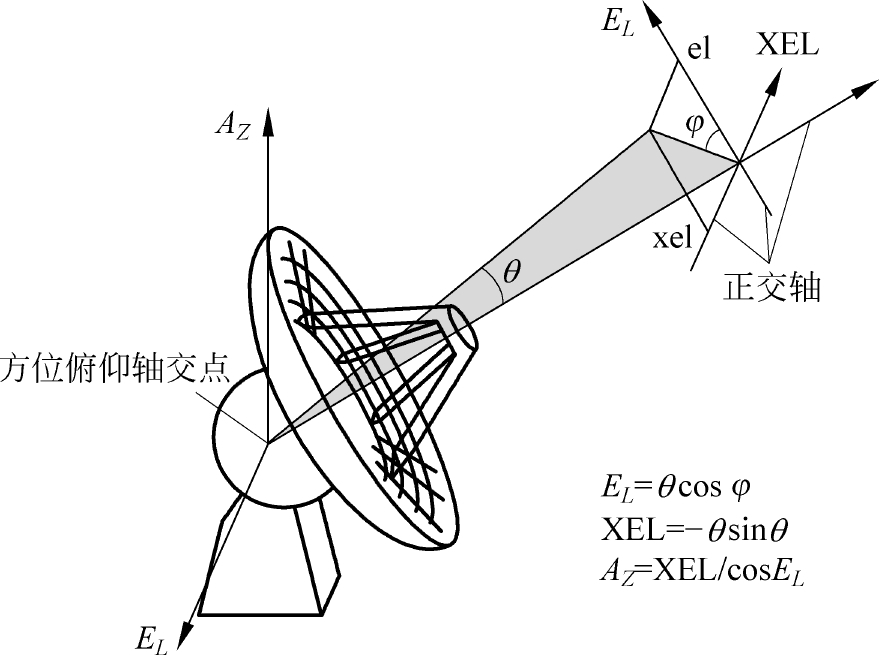
图1-13 波束波导馈电系统坐标示意图
在天线坐标系中,空间位置可表示为球坐标和直角坐标两种形式,球坐标分量为(θ,φ),直角坐标分量为(xeloff,eloff),二者之间满足:

式中 θ, φ——目标偏离瞄准轴的偏离角。
设跟踪接收机解调输出的误差电压为(fxeloff, feloff),对应空间目标偏差角在天线坐标系(xeloff, eloff)轴上的投影。
下面给出误差电压到地角坐标系中天线方位与俯仰角误差的转换公式。
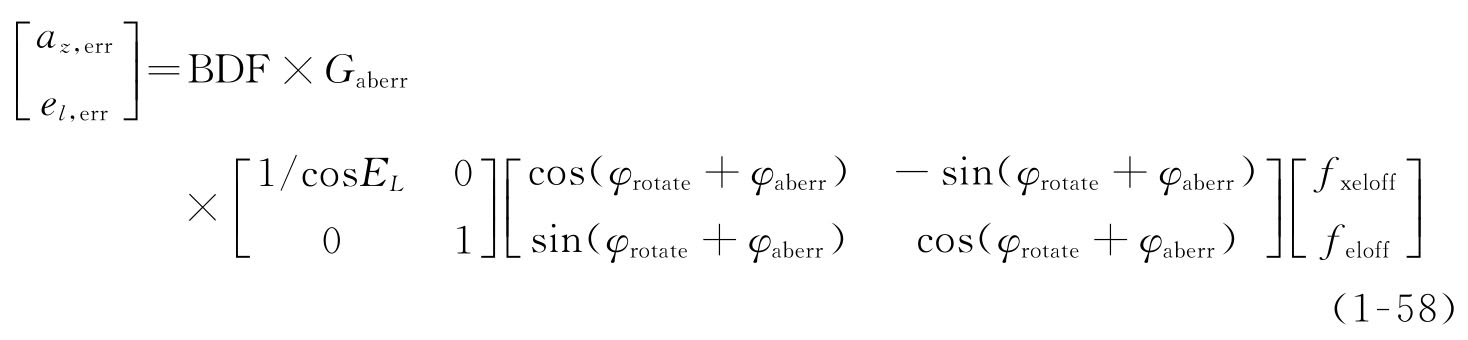
式中 Gaberr——由于变形引起的增益损失;
φaberr——由于变形引起的相位畸变;
BDF——天线放大因子;
φrotate——与当前方位角、俯仰角相关的角度值。

式中 AZ——天线当前方位角;
EL——天线当前俯仰角。