DSF1的信息流程如图1-14所示,下面简述系统的工作原理和过程。
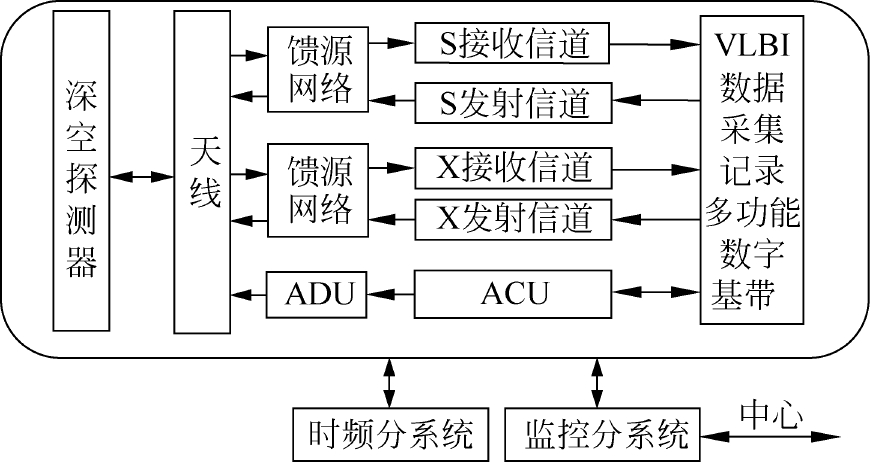
图1-14 测控系统信息流程
DSF1工作在S、X两个频段,每个接收频段均具备单脉冲双通道角跟踪功能。
为了接收深空目标的下行微弱测控信号,系统采用波束波导天线和低温低噪声放大器,基带具备极低信噪比的信号捕获和跟踪能力;发射分系统配备了S频段10kW高功放和X频段10kW高功放。
测控采用残留载波调制,其中测距采用多音测距、音码混合测距和伪码测距三种测距方式,系统具备双向测距和三向测距的能力,具备数传解调功能。数传采用残留载波调制(PM)和抑制载波调制(BPSK/QPSK/OQPSK)。测速具备单向测速、双向测速和三向测速三种工作模式。
DSF1具备VLBI信号(包括射电星和航天器信号)的接收、数据采集记录和基带转换功能。
时频分系统配置2台氢钟,并具备时间同步功能,以保证深空测控系统的测量精度。
地面深空站可以实现对目标航天器的角度跟踪,完成目标航天器的径向速度、距离的测量;配备多条接收链路和多台基带设备,可以完成同一波束内两个目标下行遥测、数传数据的同时接收;具备大功率上行信号发射功能,可以实现对一个目标的上行遥控和数据注入;在测量体制、信息格式、技术指标上采用多种国际规范,具备国际联网能力;设立远程监控终端和远程运管接口,能够实现远程监视与控制能力,满足系统安全和运管要求。
在测量体制方面,测距的音码测距、伪码测距、侧音测距,测速的频段、转发比,VLBI的差分单向多普勒测量(DOD)、DOR、双差分单向多普勒测量(ΔDOD)、ΔDOR、同波束干涉测量(SBI),时频基准信号格式,SLE数据传输等均与国际深空设施兼容,可以满足国际合作需要。
地面天线跟踪目标通常有两种方式:一是数字引导,即根据当前理论轨道计算天线A、E指向角,驱动天线指向目标;二是自动跟踪,即用差波束零点(和波束最大值)对准来波方向,实现对目标的跟踪。
接收下行信号时,由于传输时延的存在,天线自动跟踪的角度与当前时刻理论指向角度存在一个小的偏差Δα1,天线指向总是稍稍滞后于理论目标位置,好像是一直在追赶目标,即当前时刻t0的天线指向的是t0-τ时刻目标的实际位置,τ为无线电波从探测器到达地面站所需的时间。
上行链路方面,地面站在t0时刻,按照当前理论角度α0指向探测器,发送上行遥控指令,当信号在t0+τ时刻被探测器接收到时,探测器与地面站之间夹角已经从α0变到α1(t0+τ时刻地面站指向探测器的理论角度),二者之间存在一个偏差角Δα2。为了确保探测器接收到最大信号,需要调整发波束,比当前理论角超前Δα2。
当收波束峰值对准来波方向时,收发波束不一致会在上行链路上带来增益损失。天线跟踪目标时,在天线方位角A和俯仰角E上叠加偏置量,使得上行发射和下行接收均在一定程度上偏离波束峰值,根据任务特点实现主波束使用的最优配置。比如在通常测控任务中,由于上行链路裕量较大,而下行链路通常传输电平紧张,此时让波束峰值对准下行来波方向是最优的,因为收发波束不一致造成的上行链路增益下降(S/X频段小于1dB)不会影响任务正常执行。在实时变轨等测控时段内,则需要调整波束峰值对准上行电波方向,使目标接收到的上行信号最大,以确保重要遥控指令的高可靠性传输。
长的传输时延除了会造成深空任务中的收发波束不一致外,还对测距体制及测距模式产生影响。在深空测距设备中设计2种测距体制,即常规测距和深空测距体制。测距模式方面,增加了三向测距的功能。