天线控制子系统主要由天线控制单元、天线驱动单元、天线驱动执行电机组合、控保元件以及副反射面控制单元、角编码及时码单元、极化控制单元等设备构成,如图2-5所示。
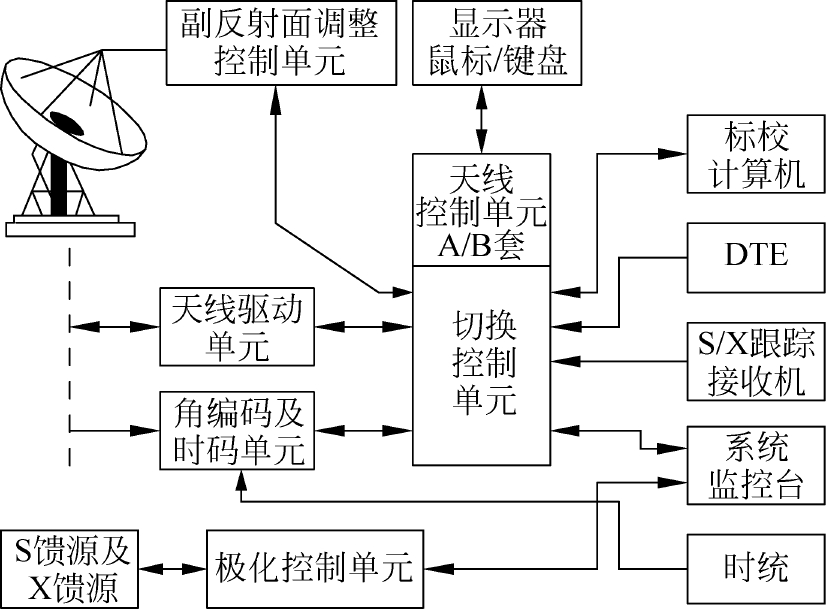
图2-5 天线控制子系统原理框图
天线控制单元是深空探测天线伺服系统的控制中心。它完成天线运动的各种控制以及各种控制策略的实时计算与实施,最终完成天线对深空目标的精确指向跟踪。ACU配置有工作方式切换和位置环路控制。环路设计为典型二阶系统,其校正运算由计算机完成,通过计算机程序控制,实现对深空目标的指向跟踪。同时,ACU还完成副面位置的调整和存储并且在不同仰角进行修正。
天线驱动单元主要由驱动功放、环路控制与保护电路以及安装在天线上的执行电机等构成,主要完成功率放大、能量转换以及逻辑联锁,最终推动天线转动(包括实现副面实时调整),是实现天线运动的基础。从原理上讲,ADU实质上是一个电流、速度双闭环的可控硅直流调速系统。ADU除了接收ACU的控制指令外,本身具有独立的操控功能和完善的控制保护逻辑,其中包括副面驱动电路和控保装置。
角编码及时码单元设计为一体化。由于角编码精度要求很高,所以采用光电位置编码。光电位置编码的基本原理是利用光的干涉和衍射原理,在玻璃机体上刻蚀非常精细的、有规则的栅状结构刻线,形成栅尺;将光源、两块栅尺(动尺和定尺)、光电检测器件等组合在一起构成一个测量传感器,即光栅尺。当动尺与定尺产生相对移动时,由光电检测器件敏感出光信号的变化,并将其转换成电信号,动尺移动一个栅距,输出电信号便变化一个周期,光栅尺是通过对信号变化周期的测量来测出动尺与定尺的相对位移。
时码电路的基本原理是接收时频信号,为位置数据和天线控制子系统提供相应的时间基准信号。
角编码和时码单元框图如图2-6所示。
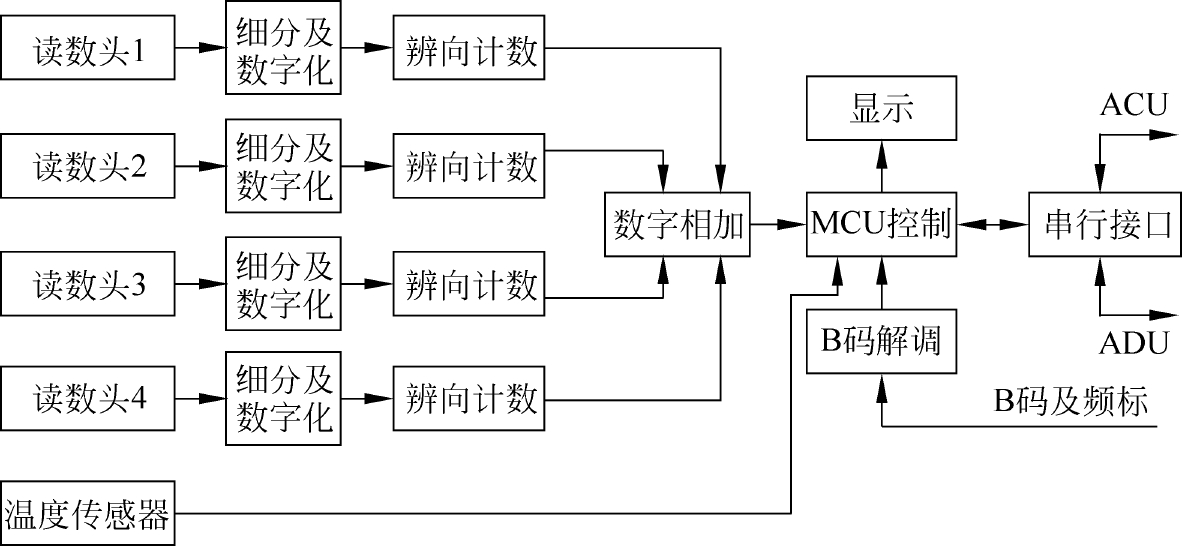
图2-6 角编码和时码单元原理框图
特别说明的是,由于大型天线结构的特殊性,为了保证结构的安全,手动控制不设置手摇操纵杆。