深空测控大型天线口径较大,结构复杂,天线系统的谐振频率必然较低。较低的谐振频率将直接抑制伺服带宽的提高,使得天线控制子系统抗阵风扰动能力变弱,深空探测系统由于阵风扰动产生的指向精度的测角随机误差变大,因此,应该采取必要的措施来减小由于阵风扰动而产生的随机误差。
抑制阵风扰动的控制策略问题可分为两方面:一个是阵风扰动模型的建立,另一个是线性二次型高斯(LQG)控制器的实现。阵风扰动属于系统辨识的范畴,LQG控制器属于现代最优控制理论范畴,两者在实现上需要进行不断的数学仿真和模型修正,理论性和前瞻性极强,所以,在抗阵风扰动的控制策略设计方面将发挥高等院校的理论研究特长,与院校的模式识别和控制理论专业进行充分合作来实现抗阵风扰动控制策略。
阵风扰动对天线指向精度的影响
作用在天线上的风可以分为稳态风和阵风:稳态风在天线上产生一个固定力矩,该力矩还随天线转动而变化,并不是固定值,所以由稳态风产生的力矩可分为平均力矩和低频变动力矩两部分;阵风是在稳态风附近起伏可变的分量,它在天线上产生不同频率的变动力矩。
天线的受风力矩计算是一个很复杂的问题,它与风速、风向、天线口径及其结构、天线转速和位置有关,需要利用模型进行风洞试验确定,一般情况下常把受风力矩表示成为风速的函数。相关实测数据表明,在10km/h的风速下,阵风扰动引起的随机误差为2.7×10-3(°)。
阵风扰动模型的建立
阵风扰动对大型天线的作用可以从三个角度来分析:
- 阵风扰动作用在天线口面上引起天线的指向误差;
- 阵风扰动力矩作用在伺服驱动内环路的电流环上;
- 阵风扰动速度作用在伺服驱动内环路的速度环上。
可以证明,以上三种分析其结果是一致的,国外大型深空探测站的实际测试数据分析也表明了这一点,因此,我们采用的阵风扰动模型如图2-37所示。
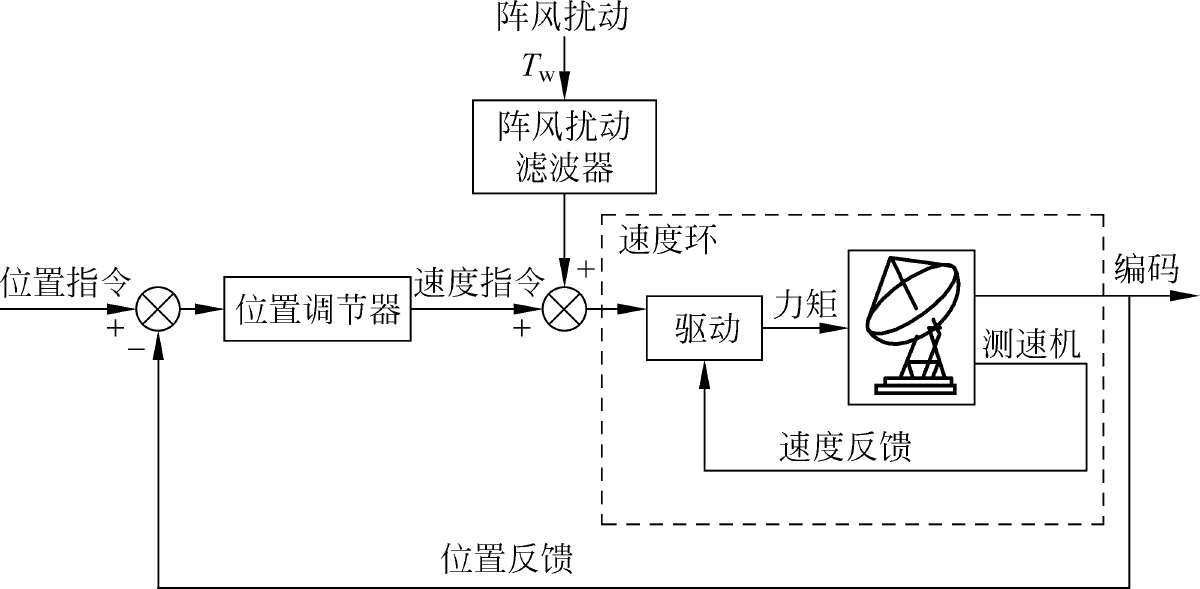
图2-37 作用于速度环的阵风扰动模型
要克服阵风对天线指向精度的影响,必须建立精确的阵风扰动模型。对于阵风扰动这样的随机事件,不存在精确的解析表达式,只符合统计学的规律。因此要准确认识阵风扰动,需对阵风扰动进行系统辨识和模式识别。从深空天线所在地的地形地貌和气象历史数据出发,利用模式识别理论进行数据处理,获得阵风的功率谱密度函数,并用实测数据对其进行不断的修正和验证,最后得到能真实反映阵风扰动的系统模型,将其作为抑制阵风扰动控制策略的控制对象。
LQG控制器的设计
在利用系统辨识的数学方法获得深空探测天线所在地的阵风模型后,有针对性地选用合适的控制策略可以有效地抑制阵风扰动,减小系统的随机误差。比例积分(PI)控制器是天线系统环路校正的主要控制器之一,在各类天线控制中占有非常重要的地位,是目前各类测控雷达天线最常用、最有效的控制器之一,NASA的深空探测天线也都是以PI控制器为基础,并取得了较好的控制效果。为了进一步提高控制精度、减小由于阵风扰动带来的随机误差,在深空探测天线控制子系统中,采用LQG(线性二次型高斯)控制器的控制策略。LQG控制器的最大优点在于伺服带宽较宽,抗风扰能力强,调整时间短,超调量小。
深空探测天线控制子系统指向方式控制的是天线机械轴,天线在阵风载荷作用下,阵风扰动量经过机械轴轴角传感器送到LQG状态估值器,状态估值器进行阵风载荷模型辨识后,将处理过的风扰动量送到LQG控制器进行后馈复合控制,控制原理见图2-38。
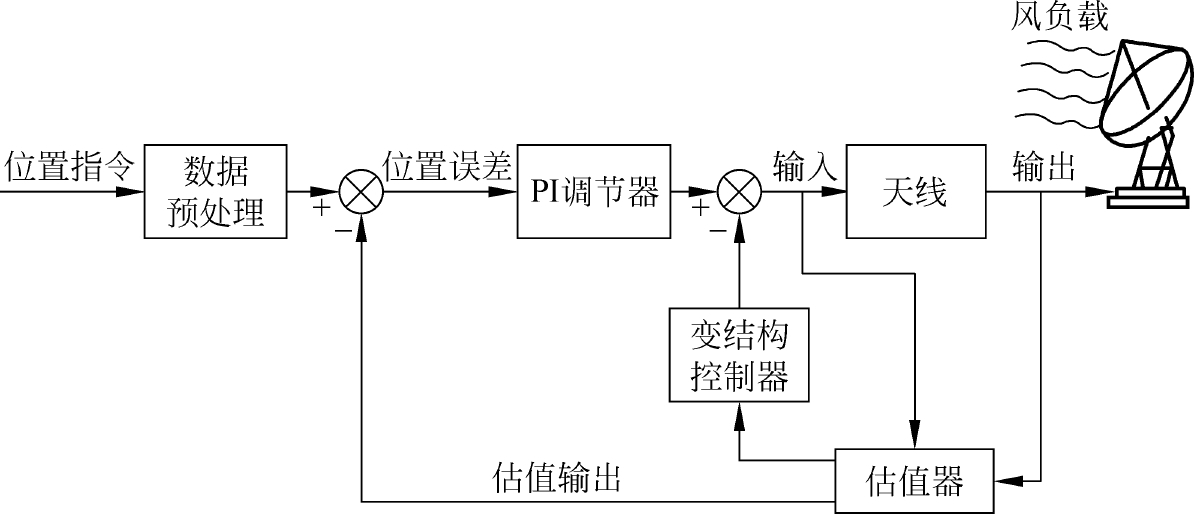
图2-38 深空探测天线指向控制原理框图