锁相环是一个闭环的相位控制系统,工程上用来作为周期信号的相位估计和跟踪,是实现相干解调的基本单元。在深空通信环境下,接收信号具有信噪比极低、高阶相位动态大(主要体现在频率扫描等方面,从指标分析,在S频段接收信号的中心载频最大多普勒扫描速率为200Hz/s,而在X频段扫描速率达800Hz/s)。不同于其他任务的锁相环设计方法,深空通信系统中用于同步的锁相环由于极低的接收载噪比,带宽需要很窄,在超窄带情况下,环路的工作特性(包括环路的稳定性、捕获性能和跟踪性能)以及环路的测试工作过程需要进行详细的分析。下面先分析一下传统的锁相环。
锁相环基本结构
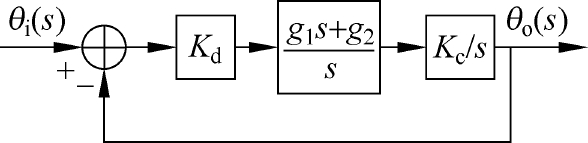
锁相环根据其环路低通滤波器的结构可以分为一阶环、二阶1型环、二阶2型环等环路,不同环路性能主要体现在对信号的跟踪能力上,其中二阶2型环由于能无误差地跟踪频偏信号以及实现简单的特性得到广泛使用。近年由于FPGA等可编程逻辑器件的应用,为理想积分器的实现提供了平台,使得二阶2型环得到了更广泛的应用,现在通信系统中采用的基本上是这种结构。二阶2型环的系统结构如图5-63所示。
图5-63表示的系统可以根据梅森公式简化为

传递函数中,ξ为阻尼系数,反映系统对扰动后的相应特性,是描述系统抗干扰及相应速度的重要参数,实际应用中,系统通常工作在欠阻尼状态,即ξ<1,通常取ξ=0.707;ωn称为无阻尼振荡频率。这2个参数共同描述了二阶系统。在欠阻尼情况下,系统的暂态过程可以描述为以ωn频率振荡加上以ξ系数阻尼的过程。
由于应用广泛,很多文献对二阶环的稳定性、跟踪性能、捕获性能以及噪声特性进行了分析,本文针对工程指标,对环路的跟踪和捕获性能进行分析。
环路跟踪性能分析
跟踪性能可以分为线性跟踪和非线性跟踪两方面,分别描述环路的不同工作状态。
线性跟踪性能
线性跟踪是指在跟踪过程中相位误差保持在正弦函数的线性近似区。统计分析表明:在跟踪稳态误差为0时,要求跟踪相位的标准差小于13°,可以认为是线性跟踪,线性跟踪可以采用线性系统的分析结论。在通信系统中,对相位的估计要求高,通常要求系统对相位保持线性跟踪,线性跟踪下输出相位的方差可以表示为

式中 Bi——线性范围;
BL——双边环路带宽。
式(5-36)表明:可以通过减小环路带宽的方法保证较高的环路输出信噪比。准线性法分析得出,6dB是环路稳定工作的门限,实际工程应用中,要保证锁相环的线性稳定跟踪,输出信噪比要达到10dB以上。
但是,在深空应用中由于扫描频率的存在,二阶环的跟踪存在稳态相位误差,输入信号具有频率斜升特性时的相位可以表示为:

式中 u(t)——阶跃函数;
R——扫描率(rad/s2)。
二阶环路在跟踪具有二阶变化的相位信号时,其跟踪稳态误差为

可见,环路带宽越窄,频率扫描速率越大,则跟踪稳态误差越大。当Δθ∞>13°时,锁相环将无法进行线性跟踪。在这种情况下,噪声的影响不再满足上面分析的带宽关系,而会急剧恶化,出现门限效应,引起跳周概率急剧增大、失锁概率加大等不利情况。
图5-64给出了在不同的接收载噪比下保证环路线性跟踪的最大扫描速率。指标要求,如果采用该环路,在没有多普勒预报时的接收灵敏度为20dBHz允许的最大扫描速率约为12.7Hz/s;在具有多普勒预报时的接收灵敏度为0,则运行的最大扫描速率约为1.3×10-3Hz/s。而指标要求在S频段最大多普勒扫描为200Hz/s,在X频段的频率动态更是高达800Hz/s,因此采用传统的方案已经不能满足指标需求。如果要满足最大多普勒动态的跟踪需求,则载噪比只能是大于29.0dB。
可见传统锁相环对于处理多普勒动态与极低灵敏度是矛盾的,一方面要保证极低的接收灵敏度,环路带宽需要做得很窄,但超窄带锁相环又不能跟踪高的多普勒动态导致的高阶变化。
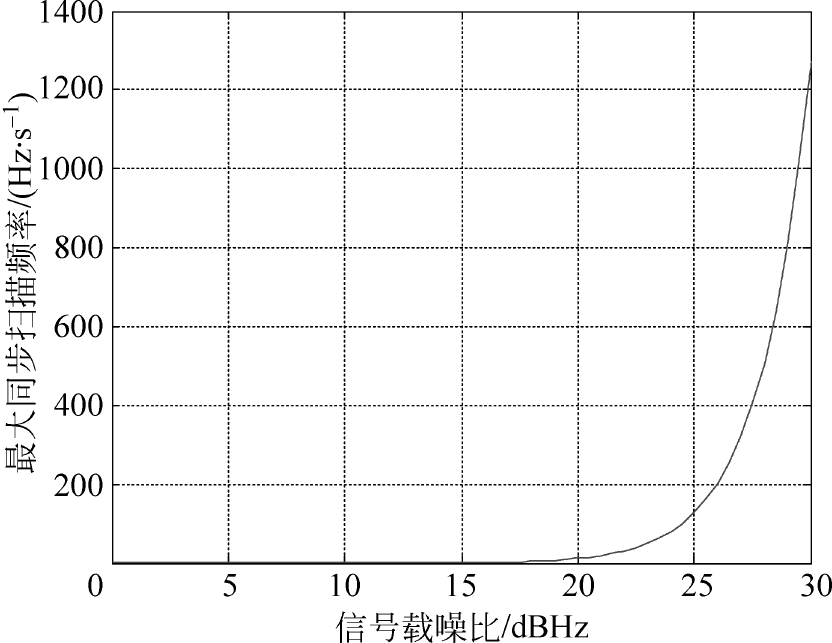
图5-64 不同载噪比下的最大多普勒动态
非线性跟踪性能
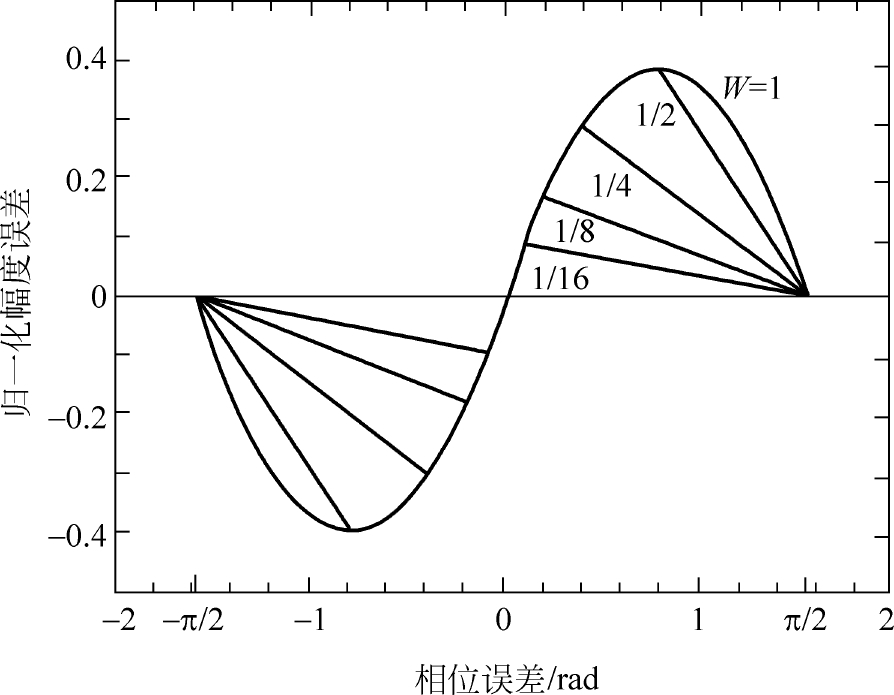
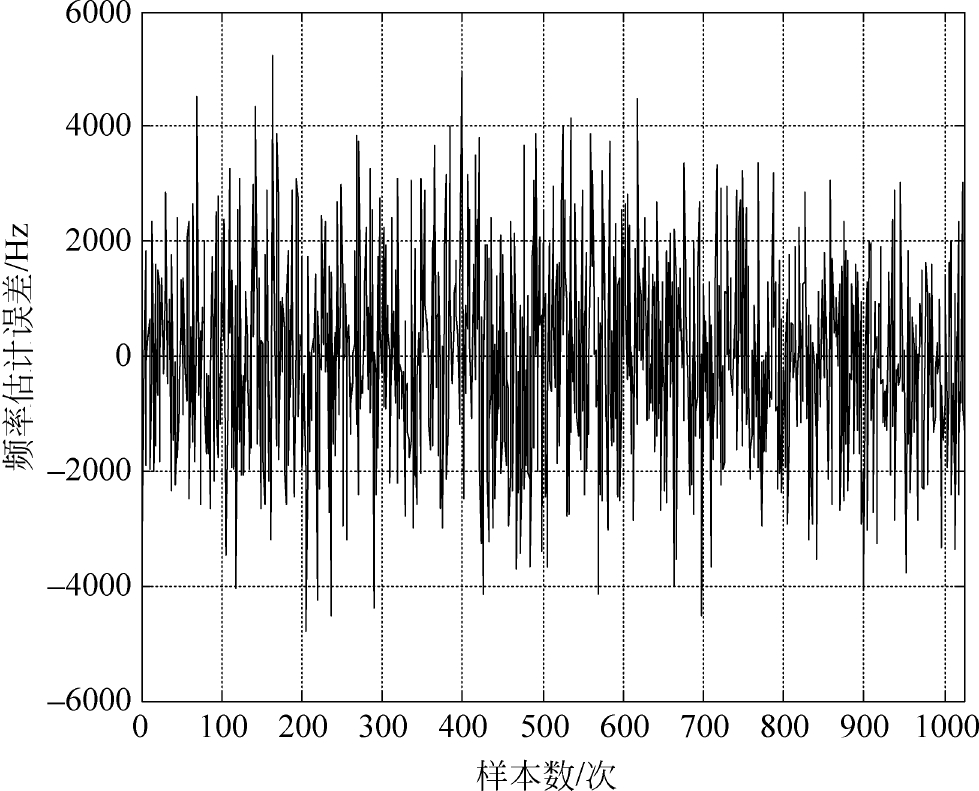
非线性跟踪是指环路能维持跟踪,但是在跟踪时相位误差超出了鉴相器的线性范围。在这种情况下,锁相环会出现非线性系统特有的门限效应,其性能急剧恶化,出现跳周、短暂失锁,甚至环路失锁等现象。在跳周也就是短暂失锁的情况下,环路可以继续维持跟踪,但是其估计相位由于跳周频繁,已经无法提供信号的相干解调;而出现环路失锁后,环路会以较大的概率在噪声的影响下偏离锁定点而永久失锁。在试验与仿真分析中发现:当环路输出信噪比SNRL降低到4dB附近时,环路的实际信噪比与线性分析结果误差明显变大。图5-65与图5-66分别给出了在稳态相差为零和具有稳态相差下的相位误差。
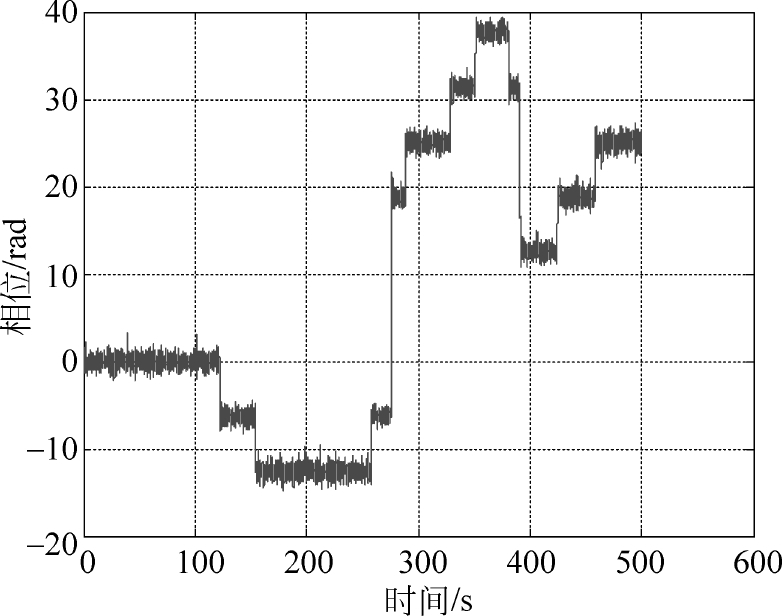
图5-65 稳态相差为零时的跳周现象
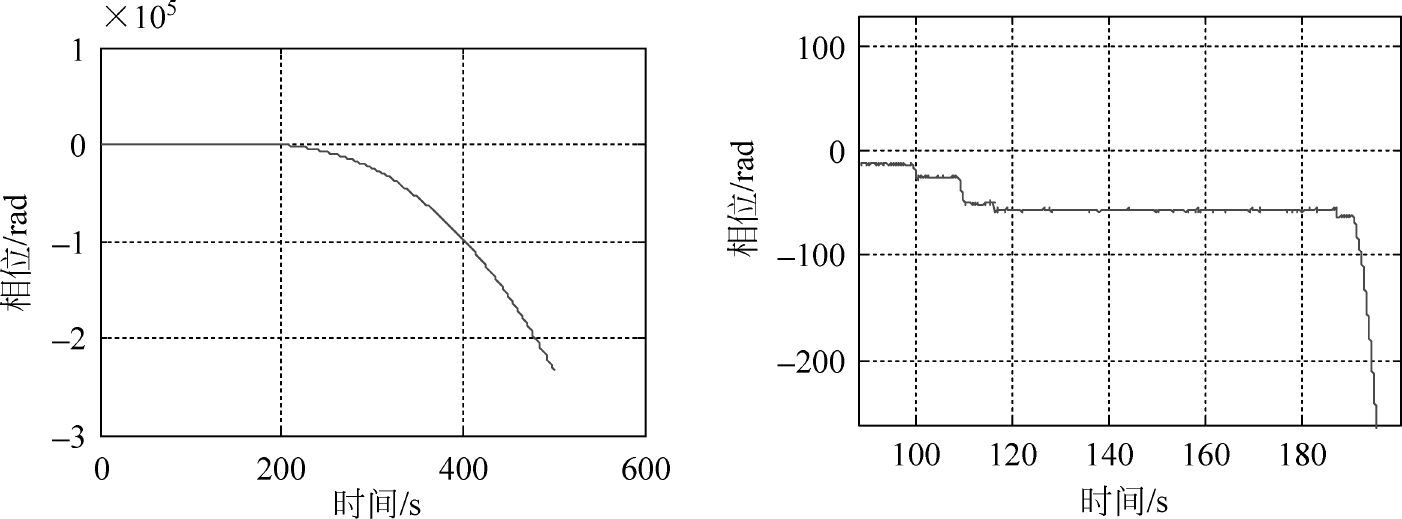
图5-66 具有稳态相差时的跳周与失锁现象
图5-65与图5-66的仿真条件是环路输出信噪比为4dB。可以看出:在没有稳态误差的情况下,环路会出现跳周现象(观测1500s得到平均跳周频率为19.3×10-3Hz),但是会很快进入稳定相位点;而在具有稳态相差的情况下,跳周明显偏向一个方向,并且经过多次跳周后出现了失锁现象。
在无噪声下,环路的最大扫描同步带为

根据上式可以得到800Hz/s的扫描动态需要至少37.6Hz环路带宽。先不考虑动态情况,在无稳态相位误差,稳定非线性跟踪要求环路输出信噪比为6dB,接收载噪比为20dBHz时,环路带宽要求环路带宽25Hz;当接收载噪比为0时,要求环路带宽0.25Hz。如果同时考虑了动态,则会引起稳态误差,从分析结果可以看出,环路失锁概率会大大增加。
可见,环路非线性跟踪的时候,无法同时兼顾扫描动态与噪声影响,无法进行跟踪。
数据解调性能
通常载波锁定后,本地锁相环估计出来相位用于数据的相干解调。在动态情况下,本地估计的相位是对输入相位的有偏估计,也就是
有偏估计会导致数据解调性能下降,以二进制解调为例,根据通信系统理论有二进制的解调误码为

式中 εb——一个信息片内信息的功率;
![]() ——信息片内平滑后的高斯噪声功率。
——信息片内平滑后的高斯噪声功率。
![]() 即为一个信息内的信噪比。当估计相位有偏的时候体现在数据解调匹配滤波输出的时候出现恶化,其恶化可表示为
即为一个信息内的信噪比。当估计相位有偏的时候体现在数据解调匹配滤波输出的时候出现恶化,其恶化可表示为
从图5-67可以看出,在稳态误差较小的时候对解调性能影响较小,随着误差增大,对解调性能的影响也增大。
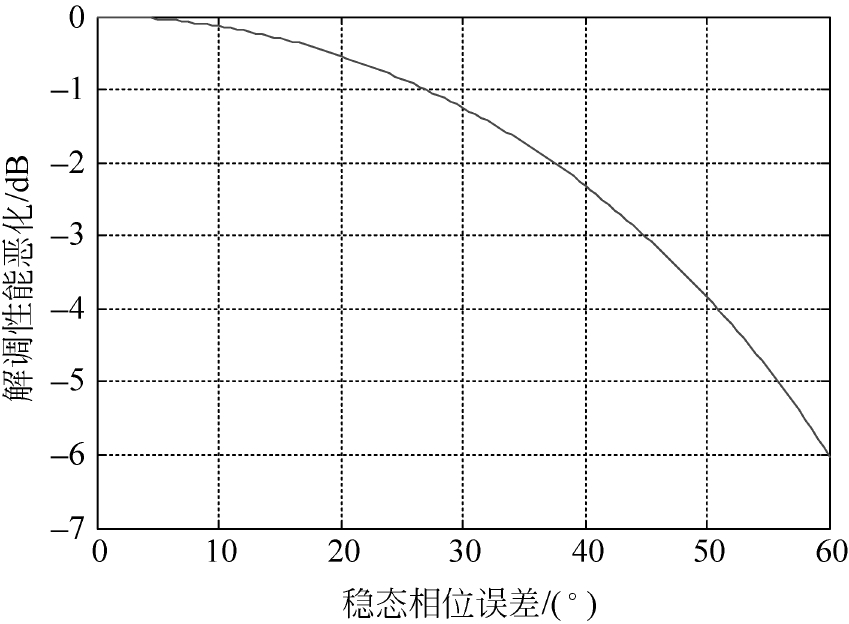
图5-67 相位误差对解调性能的影响
综上所述,在极低信噪比以及高动态的条件下,传统锁相环无法满足跟踪要求。一方面,在极低信噪比下为了保证一定的输出信噪比,环路带宽需要很窄;另一方面,锁相环对频率扫描信号的跟踪存在稳态相差,环路带宽越窄,稳态相差越大,稳态相差会引起环路跳周、失锁等非线性问题。因此,对于高动态信号的跟踪锁相环带宽不能太窄,在深空信号信噪比极低、动态高的情况下是无法进行跟踪的。最后,跟踪的稳态误差导致相位的有偏估计,影响相干数据解调性能。
环路捕获性能
环路捕获分为相位捕获和频率捕获,在本次讨论中根据实际应用情况,只允许环路有相位捕获,因此只讨论环路的快速捕获性能。
环路在捕获阶段初期,鉴相器是非线性的,因此环路捕获是一个非线性的过程。传统的分析方法是分析环路对具有频率偏差信号的捕获能力,然而在窄带情况下,频率扫描对环路捕获性能的影响已经不能忽略。对于二阶环路的捕获性能已经有很多文献作了详细的分析,这里只讨论扫描动态对窄带滤波器的捕获影响。
众所周知,二阶环的快速捕获带为
式(5-47)描述的是输入信号仅具有频率偏差的情况下,环路只需要相位捕获要求的最大初始频率偏差,然而在具有输入频率扫描的情况下,环路的捕获能力会变差。二阶环的最大捕获扫描速率为

理论的最大扫描捕获速率是最大扫描同步速率的一半,实际工作中,频偏与扫描斜率同时存在,因此考察其捕获能力应该从二维上看。图5-68给出了仿真二阶环的频率及频率斜率捕获能力。
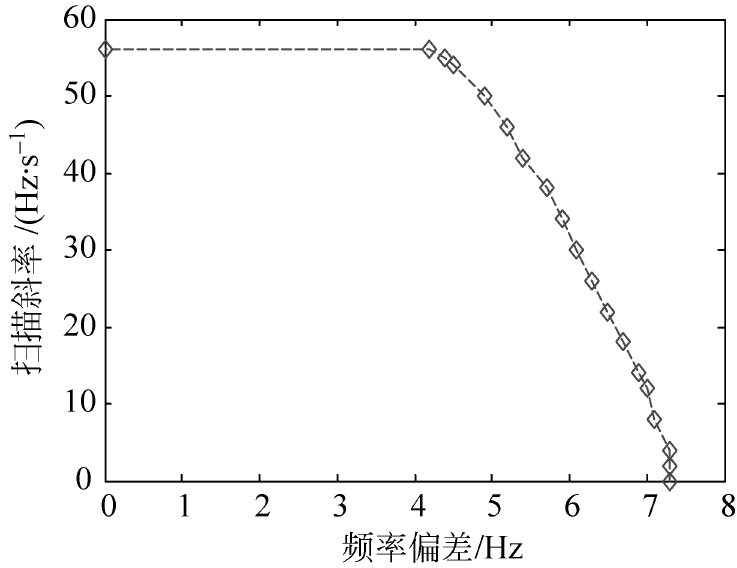
图5-68 二阶环的频率及斜率捕获能力
可以看出,仿真得到的频率快捕带略大于理论结果,这是由于理论快捕带推导时直接使用的是环路低通滤波器的高通增益,而没有考虑环路滤波器的低频增益;实际应用中,频率牵引中差频率减小,环路滤波器增益增大,因此可以增大环路的快捕带。然而在具有扫描斜率的情况下频差变化,使得环路频率快捕带变小。
图5-69给出了加入噪声情况下二阶环的频率及斜率捕获能力,加入噪声为20dBHz,环路带宽10Hz,在不同的动态条件下,环路以一定的概率跳周或无法锁定,仿真10次,认为跳周概率小于或等于10%,没有无法锁定情况则认为环路为相位捕获。可见,在有噪声的情况下,环路的捕获带缩小。
可以看出,高动态信号对于窄带锁相环的影响是使得频率快捕带变窄,并且当频率扫描率相对于环路带宽大于一定程度时,环路将无法入锁。经分析,在噪声为20dBHz时,最大运行扫描速率约为28Hz/s,无法满足系统要求。
分析总结
本节详细分析了传统锁相环的跟踪性能(包括线性跟踪、非线性跟踪及解调性能)与捕获性能,从分析结果得知:在超窄带条件下,环路跟踪高动态信号的能力减弱,并且无法对输入信号的相位进行无偏估计,从而影响解调性能。原有的环路结构无法满足深空通信的要求。
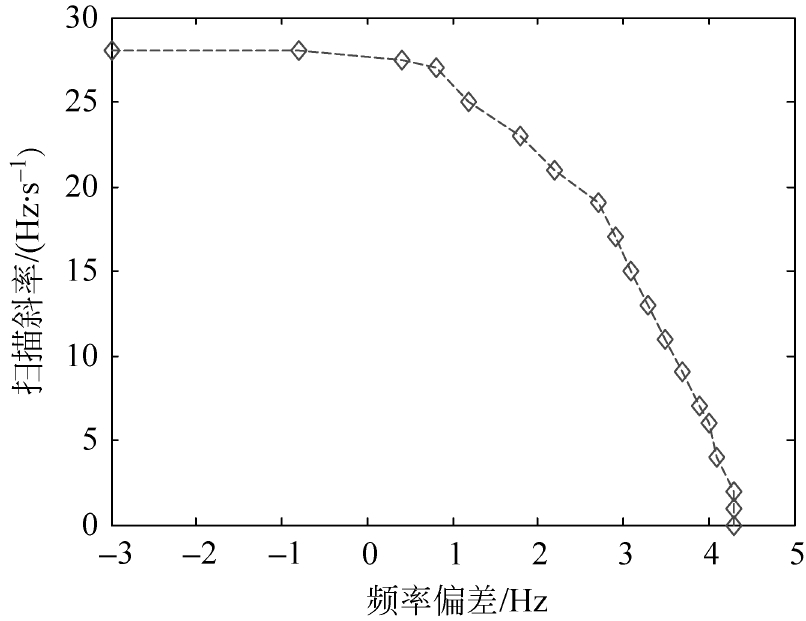
图5-69 加入噪声下二阶环的频率及斜率捕获能力