上节分析了传统锁相环结构在处理极低信噪比与高动态两种问题上出现的矛盾,结论得出,传统结构是不能满足深空通信指标要求的。分析发现,其最主要的原因是高动态与低信噪比的矛盾,根据锁相理论,理想三阶3型环可以解决这一问题。锁相环传递函数可以表达为

可得最优滤波器的环路滤波器传递函数:

环路的双边边噪声带宽定义为


图5-70 锁相环环路滤波器结构
F(s)的传递函数可以得到环路滤波器结构,如图5-70所示。
从上述分析可以看出:最优环路与最优环路滤波器的结构取决于输入相位信号的动态特性,而环路参数,即环路噪声带宽取决于输入信噪比的大小。在加性高斯白噪声作用下,频率斜升输入的最佳环路是三阶环路。
最佳接收机结构分析
上节得到了极低信噪比下频率斜升信号的最佳相位估计跟踪结构,下面分析环路性能。
三阶环稳定性分析
系统的稳定性指的是系统处于平衡状态下,受到扰动后系统自动运动的性质,如果系统稳定那么对于无论多么小的ε,总存在一个量δ,只要初始扰动不超过δ,则系统的状态都不会超过ε。
根据李雅普诺夫的定义,线性定常系统稳定的充分必要条件是其系数矩阵的特征方程的根全部具有负实数。这里,系统的特征方程要能完全表征系统。
可以利用有界输入有界输出(BIBO)稳定判据来判定系统的稳定性,BIBO稳定是指系统在有限的输入激励下输出稳定。判定稳定的方法有多种,这里由于系统结构简单,故直接采用极点判据法。系统传递函数为

经过分解得到

可见,系统传递函数3个极点分别为

式中 m=3/5BL;
BL——环路带宽。
可见,系统在上节讨论的结构上是BIBO稳定的,但是BIBO稳定只是描述了系统输入和输出的关系,而忽略了系统内部的特征,描述系统的完全稳定还需要内部特征也稳定,否则内部因素的影响也会导致环路的发散。根据分析,在得到系统的传递函数时,首先,系统的每个部分(鉴相器、低通滤波器、VCO)的传递函数都完全表征了该部分,而系统函数在整合的过程中没有出现分子分母约项的现象,也就是说,系统的传递函数完全表征了系统的输入输出黑盒及内部特征,因此系统是渐进稳定的,系统渐进稳定保证了系统的收敛性。上述条件是在系统模型正确的条件下得到的,然而,在实际应用中,系统参数估计有误差,如果此时系统刚好处于临界稳定状态,则系统可能转为不稳定,因此有必要讨论系统的稳定裕量。
裕量影响有两方面:1)环路增益的影响;2)寄生电容等引起的相位影响。
首先,经上述分析,精确模型下极点离原点距离分别为-m和-0.5m。环路采用全数字结构设计,环路参数结构稳定,但输入信号电平对环路参数的影响较大,尤其在环路捕获阶段,接收机AGC为非相干AGC,此时输入电平存在电平起伏、电平控制不准确等问题,这些都可能会引起环路的不稳定,因此需分析环路在输入电平扰动情况下的稳定性。
输入电平主要影响鉴相增益,环路传递函数为

式中 α——实际输入信号幅度与理想输入信号幅度比值。
重新分析该式,得到极点与α的关系(根据卡丹公式可以求解极点,但公式复杂,这里采用图的方式描述)。极点m与幅度比α的关系见图5-71。
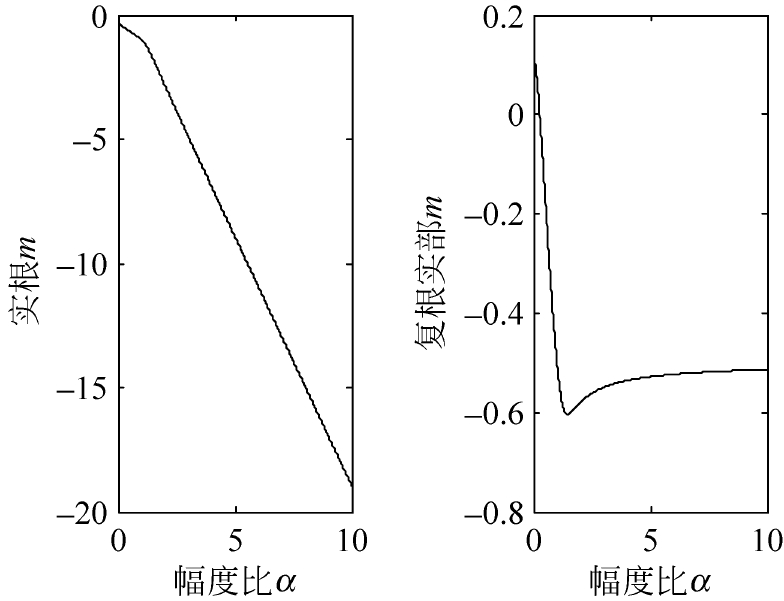
图5-71 极点与幅度比α的关系
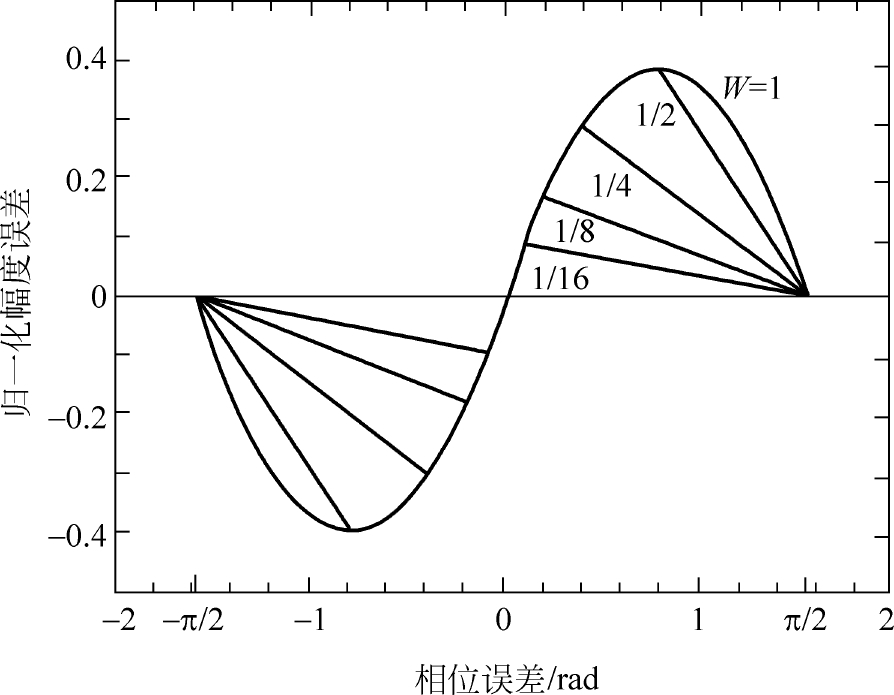
从图中可以看出,当α<0.25时有2个极点位于右半平面,导致系统不稳定。因此对于输入电平的扰动来说,系统是条件稳定的,实际电平幅度不能小于AGC控制电压的1/4,否则系统不稳定。
除了系统对环路增益的稳定裕量外,系统对环路相位也需要一定的相位裕量。下面根据奈奎斯特稳定定理确定系统稳定裕量。
在开环系统幅度为1的地方,使得闭环系统达到临界稳定状态所需要的附加相移量定义为相位裕度。相位裕度描述了系统的相位相对稳定度,也就是系统对实际应用中寄生参数引起的附加相移的容忍程度。
本系统开环传递函数为

而当幅度为1时,相位与-180°线的距离为相位裕度。
根据分析,当ω=2.015m时,幅度为1,此时相位为∠H0(2.015jm)=-120°。相位裕度为|-180°-(-120°)|=60°。因此,系统对相位的稳定度与环路带宽无关,有较大的稳定裕度。在应用中,采用数字结构实现环路,数字系统对系统模型的实现精确,引入的附加相移可以忽略不计,而算法又具有较大的稳定裕度,因此可以认为系统对相位是稳定的。
三阶环跟踪性能分析
环路的跟踪性能体现在主要两个方面:一方面是跟踪高动态相位的能力,另一方面是体现在跟踪质量,主要是噪声引起的相位噪声以及跳周等问题。下面一一分析。
一、高动态跟踪能力
从前面的分析可以看出:在带宽极窄情况下,传统环路无法跟踪高动态信号,而维纳最优准则下的锁相环解决了高动态跟踪和超窄带的矛盾。
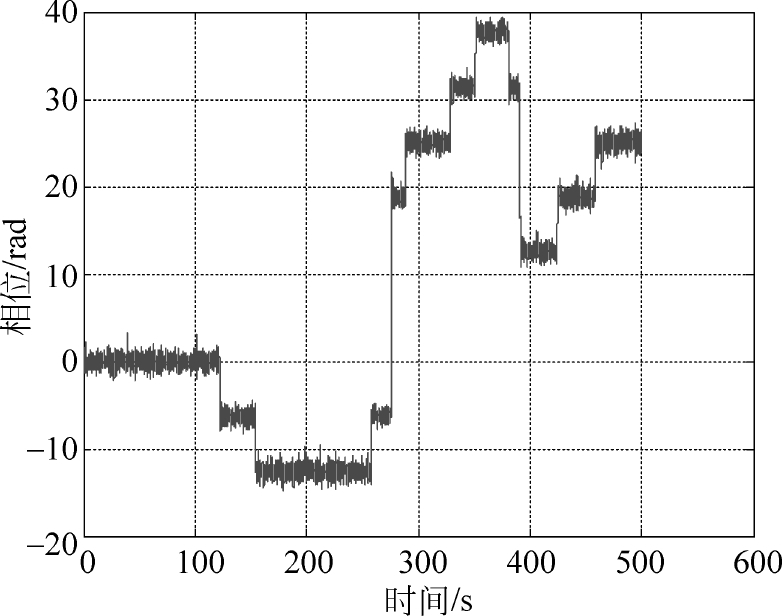
图5-72给出了环路带宽为1Hz情况下对800Hz/s扫描动态的捕获情况。可见,在捕获完成后,稳态相位误差为0,也就是说,环路结构可以无误差地估计载波相位。
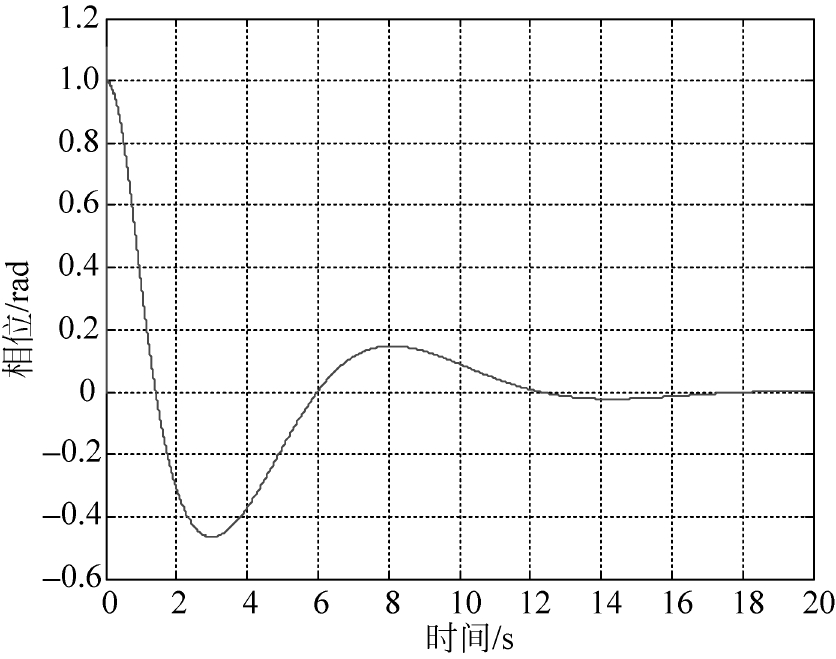
图5-72 窄带高动态捕获误差相位
经分析,带宽为0.1Hz可以跟踪扫描动态为800Hz/s的信号,满足指标要求。另外,在数据解调方面,由于环路对相位的估计是无偏估计,因此,相位估计不会引起数据解调误码恶化。
二、相位噪声
环路的相位噪声及跳周主要是由于输入噪声引起的,他们都对信息的解调产生影响。环路相位噪声引起相干解调输出信噪比下降,而环路的跳周则引起环路短暂失锁,使信息解调出现连续误码。

图5-73 加性噪声与相位噪声的关系
由于相位噪声是在环路锁定情况下得到的,应用线性系统理论可以得到输入信噪比与输出信噪比关系。在深空应用中,主要是极低信噪比的情况,因此,这里主要通过仿真的方式对高信噪比下线性相位模型进行验证,同时得到在低信噪比下具有非线性输入相位噪声特性激励下的环路输出噪声。在高信噪比下,信号噪声与相位噪声的关系见图5-73。
图5-73为单频信号加窄带高斯白噪声的示意图,信号S(t)幅度为A,噪声方差为δ2,则根据弧度定律,等效相位噪声为n(t),其方差为δ2/A2。但是,当噪声标准差δ不满足远小于信号幅度A时,等效相位噪声可近似为:

可见,等效相位噪声和噪声标准差δ是非线性关系,下面通过仿真来讨论。
图5-74和图5-75仿真了输入载噪比为17dBHz(单边,采样率5kHz,信噪比-17dB)的信号的同步,环路带宽采用双边5Hz。
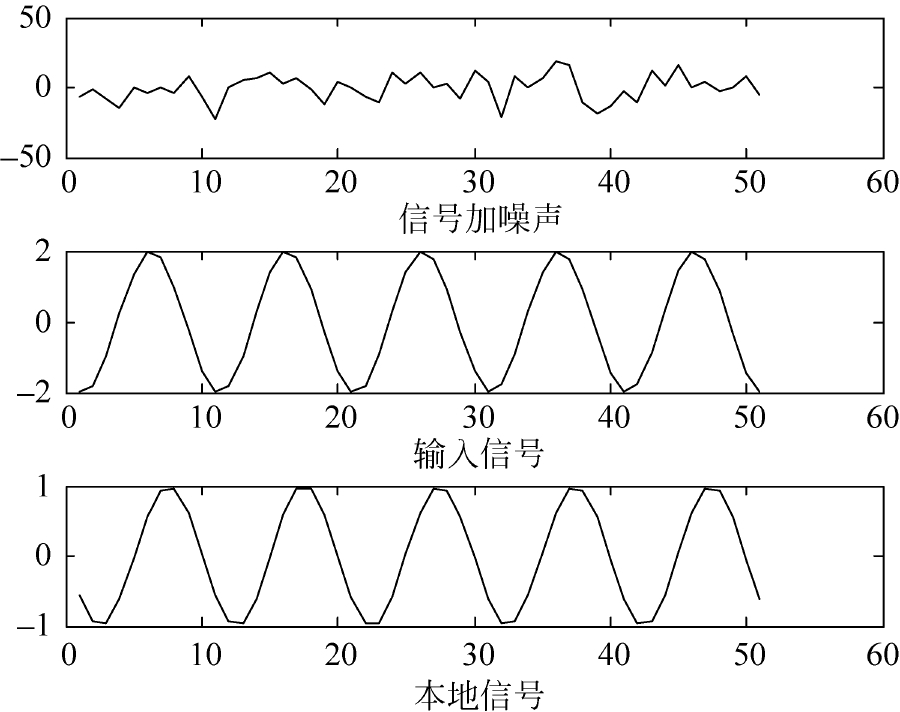
图5-74 17dBHz信号同步
可以看出,本地信号实现了同步,等效输出信噪比为13dB。
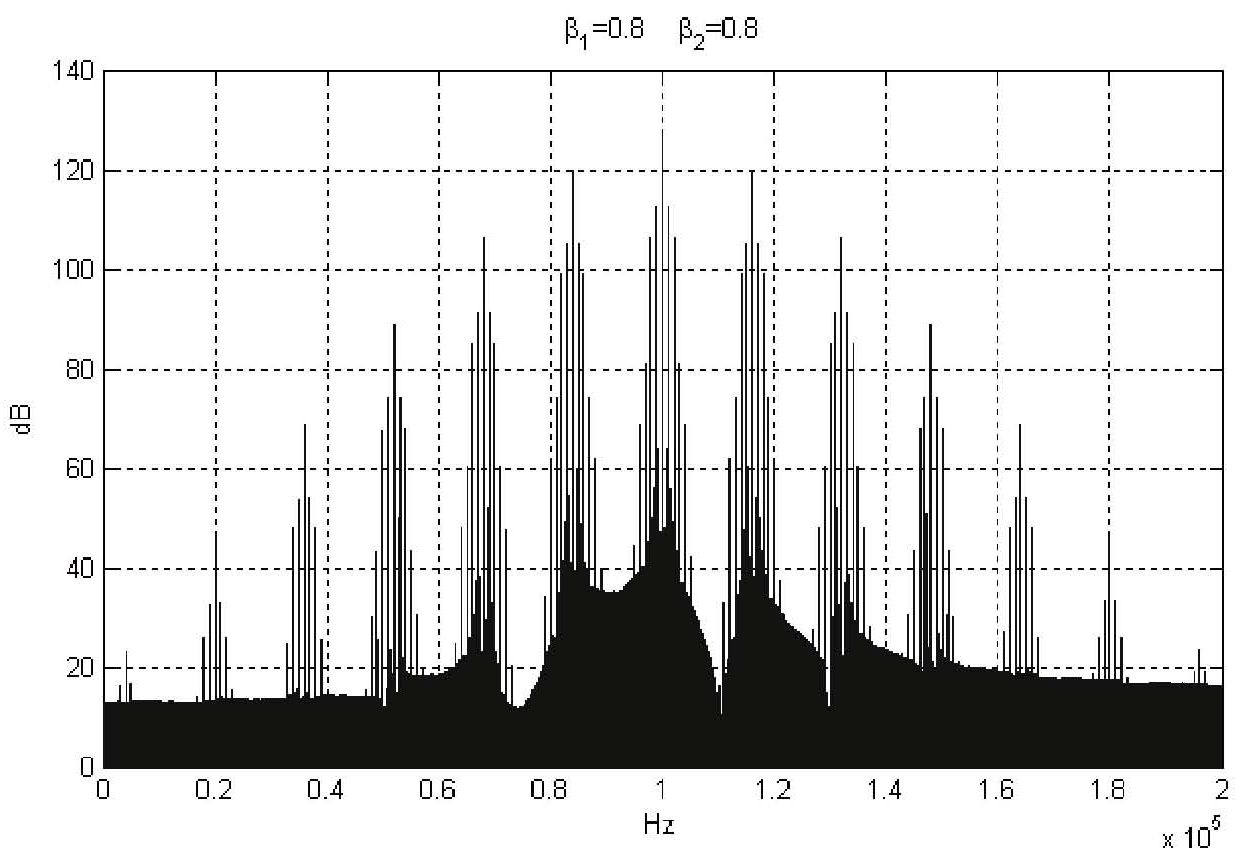
图5-76给出了不同载噪比下的相位噪声方差,仿真条件是双边带宽为5Hz,系统采样率为5000Hz。
经过分析,在等效输出信噪比大于5dB时,噪声满足线性理论结论。当信噪比低于5dB时,由于跳周以及非线性的影响,信噪比较线性理论得出的结论有所恶化。分析中,剔除了由于跳周引起的暂态过程。
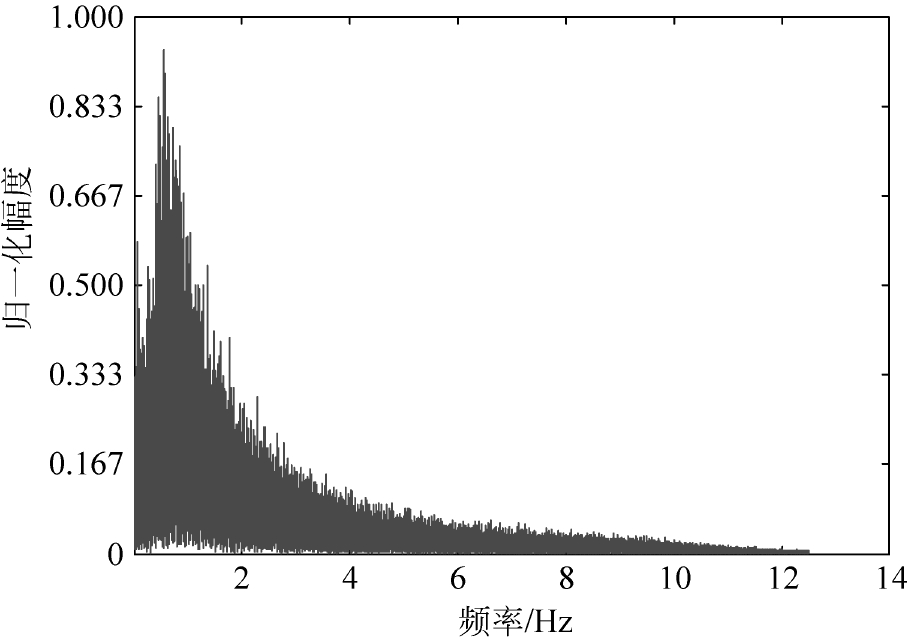
图5-75 相噪频谱特性
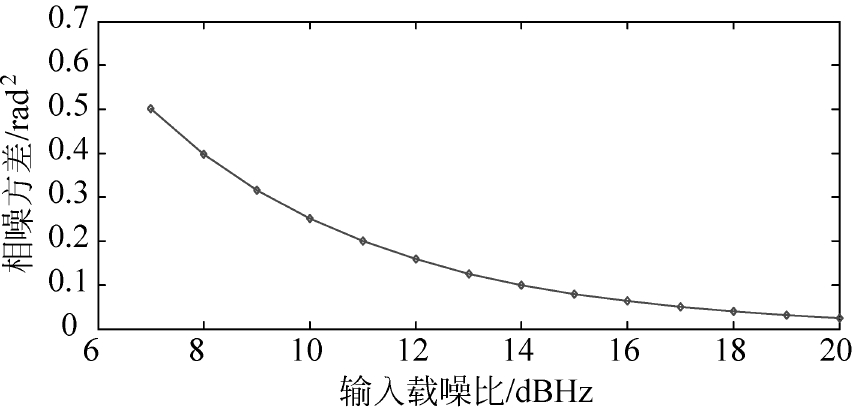
图5-76 不同载噪比下的相位噪声方差
从上述分析可以看出:锁相环解决了带宽与动态跟踪能力的矛盾,当输入信号为0的时候,环路带宽取0.1Hz,理论上环路可跟踪斜率为无限大,但是实际工程中,环路可以跟踪的斜率范围主要受器件的约束。
捕获性能分析
频率捕获完成后,须将捕获到的信息植入环路中,然后依靠环路的负反馈自我调节到环路入锁。在窄带三阶环条件下,环路除了对频率捕获有要求,还须提供频率斜率。现在分别分析窄带三阶环在不同带宽情况下的频率及频率斜率捕获带。采用SystemVUE工具进行环路仿真。
一、频率捕获
由锁相环知识可知,在三阶3型环路的频率捕获带是无穷大的,锁定过程是由于环路积分器对鉴相器差排信号的积分作用,NCO频率被牵引到输入频率,这个过程称之为频率捕获,整个过程是比较慢的。鉴相器输出分为和频和差频两部分信号,环路低通滤波器对它们起到线性滤波作用,对直流信号增益理论上是无穷大,但是延迟较大,需要较长时间;而对高频信号群时延较小,调整高频信号的环路滤波结构,就可以使NCO输出频率接近输入信号频率,这个时候环路可以很快锁定,高频输出对NCO调整频带范围称为快捕带。考虑环路滤波传递函数有高频增益:

鉴相器输出高频信号幅度为Kd,得到最大直接NCO频率控制范围:

式中 BL——环路双边带宽。
二、扫描捕获
下面通过仿真来验证锁相环对频率斜率的捕获能力。
认为稳态误差达到最大相位误差的5%时,环路进入锁定。图5-77和图5-78给出了双边带宽为10Hz时初始斜率误差与捕获时间的关系,在斜率小于约23.5Hz/s时,捕获时间较小,否则出现门限效应,捕获时间急剧增加。
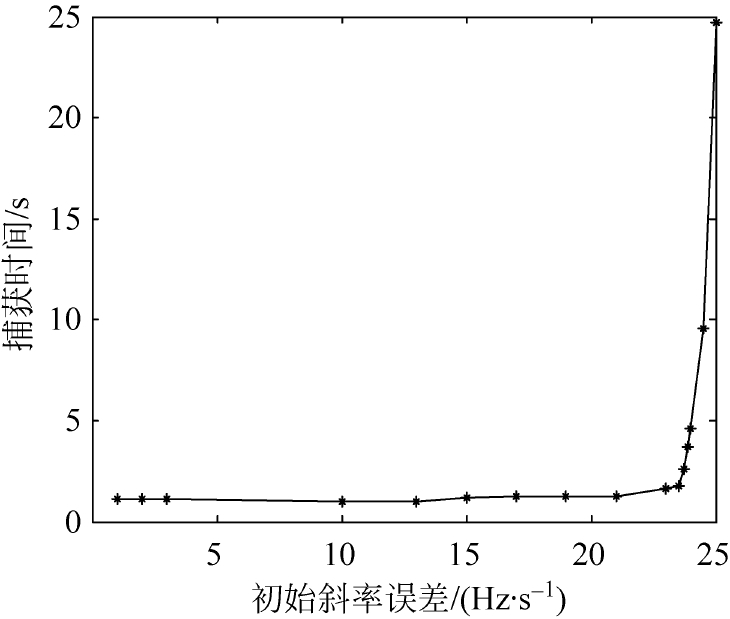
图5-77 10Hz带宽下初始斜率误差与捕获时间关系
可以看出:随着带宽变窄,频率斜率的捕获门限急剧下降。捕获时间是由系统时间相应曲线决定的,是系统相位捕获时间。当预置斜率误差低于斜率捕获门限时,可以实现误差相位无跳周捕获;当斜率误差大于捕获门限时,误差出现跳周,捕获时间将急剧增加;因此在系统捕获阶段须预先对频率斜率进行精确捕获。斜率捕获带近似表示为
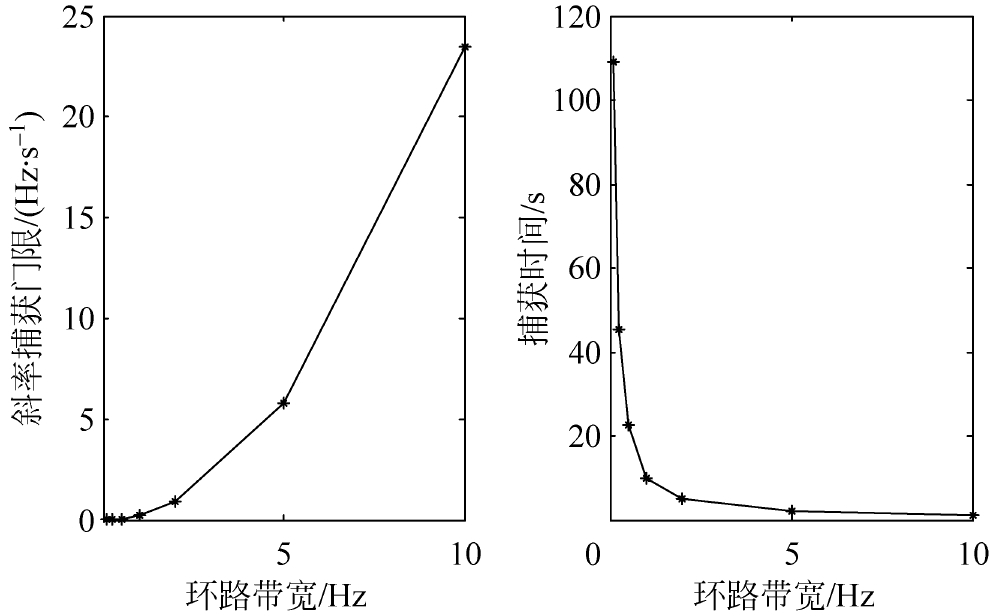
图5-78 不同带宽下的斜率捕获门限及捕获时间

在实际应用中,送入载波的频率与斜率偏差同时存在。仿真发现:在二维同时捕获的情况下,斜率捕获带缩减为单频率捕获带的1/4。
环路带宽测试方法
在线性时不变系统中,一旦系统函数确定,那么环路带宽以及对特定信号(比如阶跃信号)的时间响应函数也就唯一确定下来。也就是说,我们只需要在响应函数中找到与带宽呈一一映射关系的时间参数,那么就可以通过时间参数计算出带宽。并且滤波器带宽与响应时间之间呈倒数关系,带宽越窄,响应时间越长,对于测量来说越容易,这是传统的测试方法所达不到的。下面进行理论推导。
系统函数
锁相环的线性模型如图5-79所示。
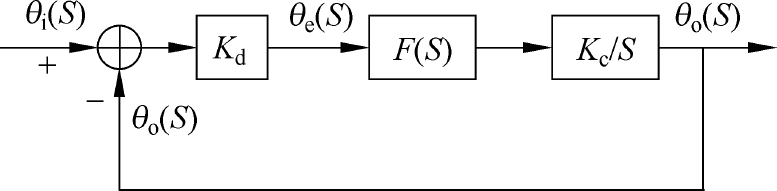
图5-79 锁相环结构
在实际锁相环系统中,参数是经过严格计算选取的,一般采用二阶或三阶环。在这里,我们采用三阶环进行设计。
现假设三阶环传输函数为

其中,ωn=1.2747BL。
误差传递函数为

当输入为相位阶跃θi(S)=Δθ/S时,其时域函数为:

在起始条件θe(t)为KdΔθ时,随着时间增长,θe(t)开始衰减。从上式可知,有2个指数衰减项,第1个因子衰减速度远大于第2个因子,当第2个因子第1次到零时,t0=4.514 581 795 79/ωn,此时,第1项衰减到7.512×10-5KdΔθ≈0。因此,可以通过测试第2项第1个过零值t0计算ωn,有
选取ω=0.1Hz,KdΔθ=1,得到的相位响应曲线见图5-80。
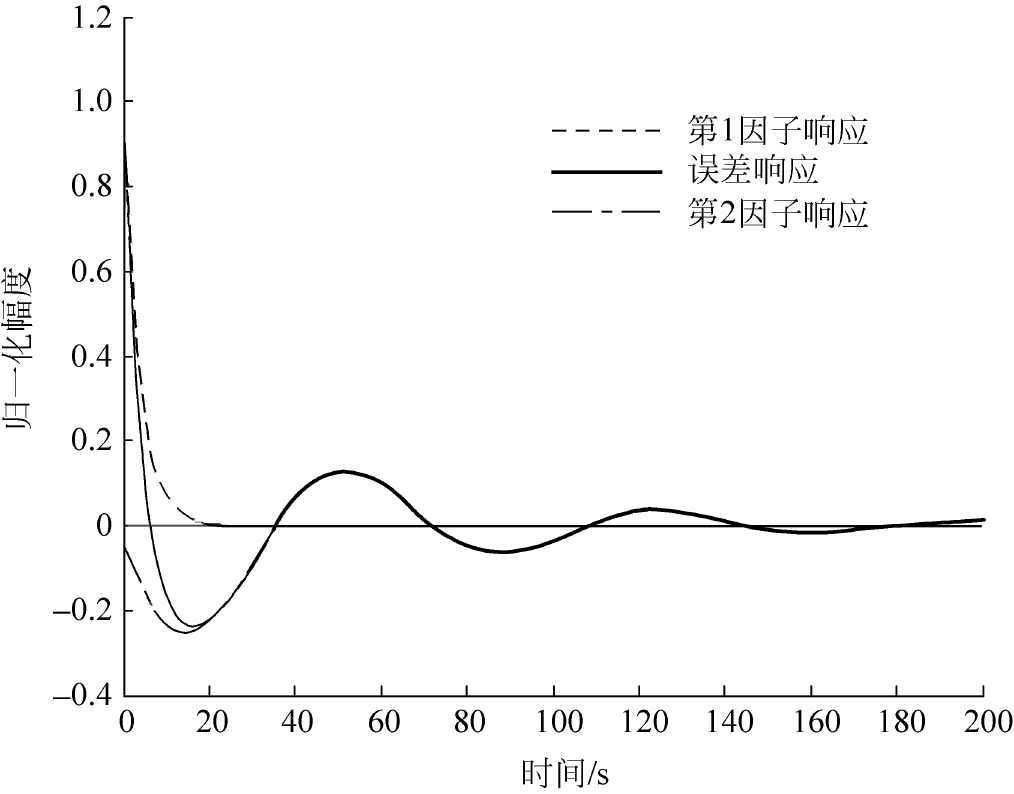
图5-80 相位响应曲线
从图5-80可知,在误差响应曲线的第2个过零点,第1个因子的贡献可以忽略,第2个因子过零,此时刻为上述t0,测量该值,可以计算带宽。
上述关系对于三阶3型锁相环均满足,实际应用中有两种方法计算K值:第1种方式为通过公式推导;第2种方式是在较宽环路带宽下利用传统方法进行1次环路带宽测试,并求出响应曲线,然后利用得到的结果得出系数K。
误差分析
当忽略第1个因子带来的误差,误差曲线第2次过零点局部放大图如图5-81所示。
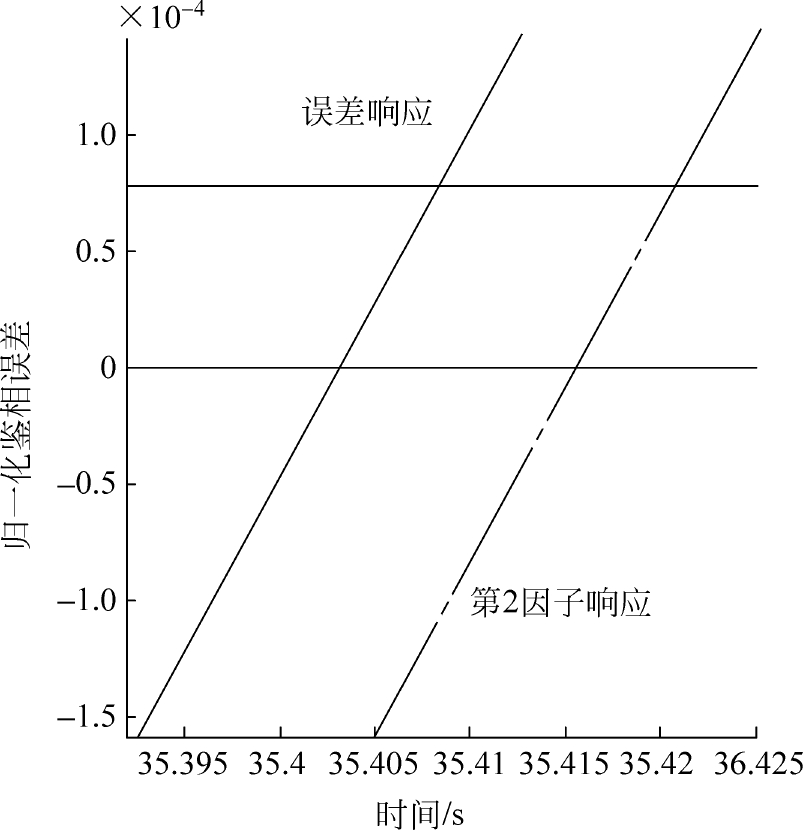
图5-81 过零点误差
图5-81中,可见第2因子响应曲线过零点为无误差点,误差响应曲线过零点为测量点,BL=3.541 689/35.4155=0.1Hz,B′L=3.541 689/35.4032=0.100 04Hz,相对误差p=[(BL-B′L)/BL]×100%=0.04%(该误差仅跟第1个因子在过零点的衰减量有关),可见与带宽是没有关系的。
可以看出,过零点具有最大斜率,因此对该点时间的测量可以有较高的误差容忍度。
性能比较
根据对传统应用环路结构与基于维纳最优的环路结构分析比较可知:两种环路都可以做到超窄带,但是在窄带条件下,传统环路不具有对高动态相位的跟踪能力,而基于维纳最优的环路结构由于同时考虑了输入噪声引起的相位噪声与动态引起的相位误差,使得该结构具有跟踪高动态相位的能力。
高动态仿真测试结果如表5-5所示。
表5-5 高动态仿真测试结果