飞行器与测控站之间的距离R是通过测量测控站发射信号与航天器返回信号之间的时间延迟实现的。对于连续波测量,时延通过测量接收信号与发射信号之间的相位差得到。设无线电波的传播路径为均匀介质,则有

式中 R——距离(m);
c——光在真空中的传播速度,取299 792 458m/s;
τ——测控站返回信号与发射信号之间的时间延迟(s);
ΔΦ——测距接收信号与发射信号之间的相差;
fR——测距信号频率(Hz);
λR——测距信号波长(m)。
飞行器与测控站之间的距离R一般远大于测距信号波长,设R内包括整数M个测距信号波长与小数倍测距信号波长,则ΔΦ可以表示为M个2π和一个小于2π的相位Δφ之和,Δφ=mod(ΔΦ,2π),mod(x,y)表示取x/y的余数。
无线电测距过程最终可以归结为两点,一是精确测量收发信号相差Δφ,二是求解整周模糊M。Δφ和M的确定与测距体制相关。
深空探测中一般采用双向(或三向)相干测距方式,地面站设备发射携带有测距信号的射频信号,装载于深空探测器的应答机完成对上行测距信号的锁相接收和相干转发,地面站设备完成对应答机下行测距信号的接收,并通过比较收、发测距信号的时延差获得距离测量值。原始距离测量值除了深空探测器至测控站间的视在距离外,还包含地面设备距离零值、电磁波在传输媒介中由于折射(主要包括大气层和电离层)引入的附加距离值、探测器应答机距离零值三部分。所以,要得到精确的探测器至测控站间的视在距离,需要进行距离零值的标校。
距离测量值的构成如图1-3所示。
测距体制
目前在深空测控中采用的测距体制主要包括纯侧音测距、音码混合测距和伪随机码测距三种。在深空测距体制的选择上,还需要考虑以下原则:测距精度足够高、无模糊距离大、捕获跟踪时间短、占用带宽受限、测距信号占用功率合理等。
纯侧音测距体制
1)信号形式
纯侧音测距体制中,测距信号由一组不同频率的正弦波或方波组成,这些正弦波或者方波又称为侧音。纯侧音测距信号形式为

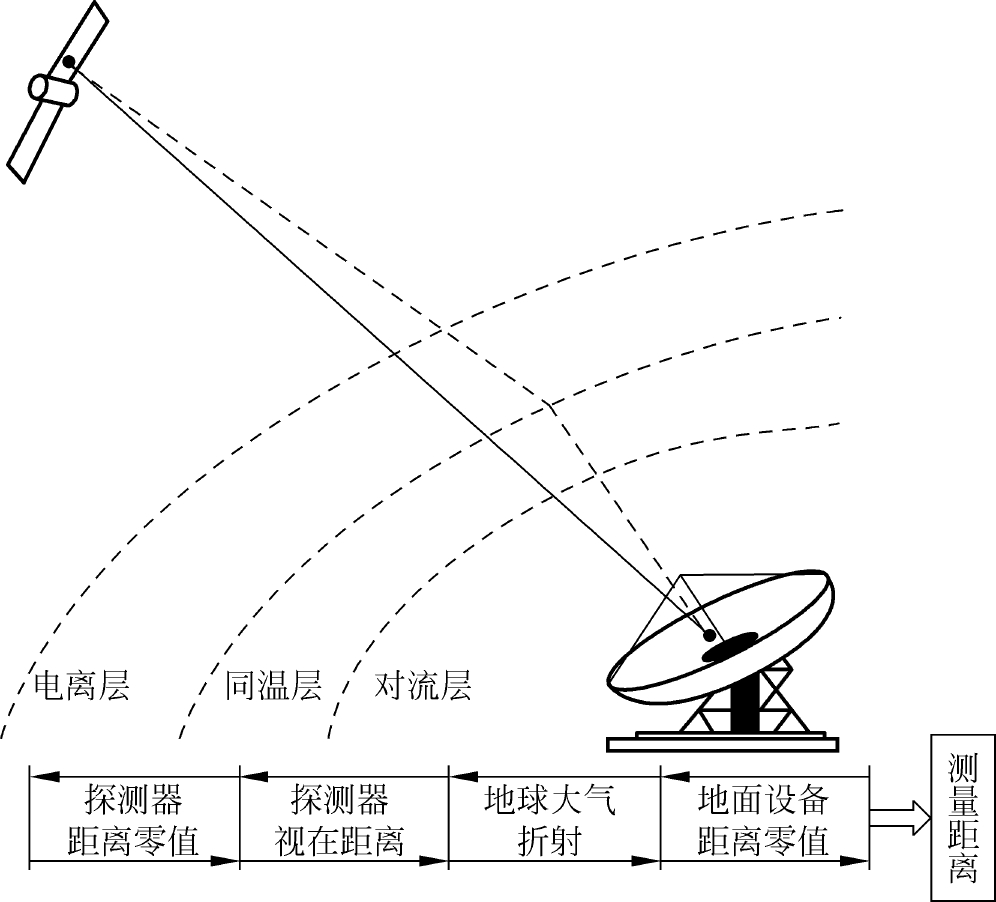
图1-3 距离测量值的构成
式中 Su——上行信号功率;
ftx——上行载波频率;
fr——侧音频率;
mr——测距信号对载波调制系数。
该测距体制的最大无模糊测量距离由最低频率侧音决定,测量精度由最高频率侧音(又称主侧音)决定。主侧音以外的其他侧音称为次侧音,次侧音按照频率顺序依次完成相邻高频率侧音的距离模糊解算。
2)测距流程
纯侧音测距体制的测量过程可分为捕获和测量两个阶段,捕获阶段完成侧音匹配解模糊,测量阶段提供高精度的距离数据。捕获阶段主侧音常发,次侧音轮发,在得到各个侧音收发相位差后,根据主侧音相位差变化将不同时刻的各个侧音相位差测量值推算到同一时刻,完成距离解模糊。距离捕获阶段完成后进入测量阶段。测量阶段只发主侧音,通过跟踪主侧音的整周变化情况,不断调整主侧音整周数,保证测距结果的正确性。
测距音轮发过程如图1-4所示。
音码混合测距体制
1)信号形式
上行信号为遥控副载波及测距信号对载波PM调制。上行测距信号包括高侧音和由其分谐波得到的码Cn(t),Cn(t)对高侧音相位调制(PM)后,再将高侧音对载波PM调制,得到音码混合测距信号:

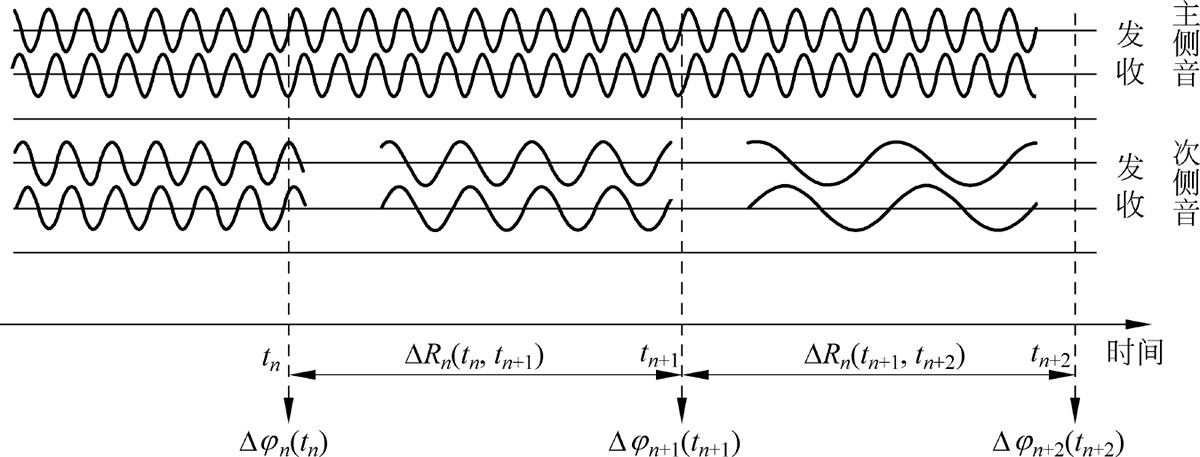
图1-4 测距音轮发过程
式中 Su——上行信号功率;
ftx——上行载波频率;
mtc——遥控信号对载波调制系数;
d(t)——遥控数据流;
ftc——遥控副载波频率;
φtc——遥控副载波相位;
mru——测距信号对载波调制系数;
fr——侧音频率;
ktone——测距码对高侧音调制系数;
Cn(t)——高侧音分谐波得到的n级测距码。
下面对解模糊序列码Cn(t)做详细说明。
Cn(t)由高侧音分谐波产生,分为n级,各级顺序发送,首先发送高侧音Q0,待地面系统捕获高侧音后,发送第1级码C1(t):

其中Q1为高侧音Q0二分频得到。地面系统捕获C1(t)后,再发送第2级码C2(t):

Q2为Q1二分频得到,顺序发送至n级码:

Cn(t)的周期为Tn=2n/fr,fr为高侧音频率,2n为n阶码的长度,n的取值取决于无模糊距离。在主音频率500kHz时,如果要得到与0.5Hz侧音相当的无模糊距离,n需取20。
2)测距流程
采用音码混合测距体制时,测距信号为序列码对主音PM调制,主音再对载波PM调制。主接收机锁定后,解调测距信号送测距单元。测距过程同样分为2步:
距离捕获过程中,上行发主音,应答机转发,地面主接收机解调出主音送测距单元主音环,主音环捕获跟踪,捕获时可以利用载波多普勒对主音频率进行补偿,辅助主音环快速捕获。主音锁定后,主音二分频构成分频链,将各二分频信号异或产生各级序列码。上行由C1(t)~Cn(t)顺序发送各级序列码,应答机转发,地面测距单元将本地序列码与接收序列码相关,根据相关值调整分频链相位,完成序列码捕获,解模糊码Cn(t)捕获后,距离捕获完成。
距离捕获完成后,继续发送主音,利用分频链恢复本地解模糊码Cn(t)(相当于接收Cn(t))进行距离提取。双向测距时,测量上行Cn(t)与本地Cn(t)间的时延就可以提取双向传输距离。三向测距时,只需保证两个站之间的时间同步,两站序列码发送时刻相同,则在本站测量收发Cn(t)间的时延,同样可以完成距离提取。由于距离提取时,Cn(t)由主音经分频链分频产生,其相位抖动完全取决于主音环的相位抖动,所以测距精度由主音决定。距离捕获完成后,除发送主音外,同时发送解模糊码Cn(t),由码相关器定时将本地Cn(t)与接收Cn(t)求相关,可以监测主音环及分频链状态。一旦出现主音环瞬时失锁或分频链跳周等问题,可以重新启动距离捕获,避免距离出现不可逆转的跳大数。
伪随机码测距
1)信号形式
伪随机码是结构可以预先确定、并可重复产生和复制、具有某种随机序列的统计特性的序列。利用伪随机码作为测距信号,测距随机误差取决于伪码时钟频率和信噪比,距离解模糊能力取决于伪码周期。
伪码测距上行信号形式如下:

式中 Su——上行信号功率;
fc——上行载波频率;
PN(t)——测距PN码;
β1——测距调制度;
β2——遥控副载波调制度;
D(t)——遥控数据;
φc——上行载波相位;
P(t)——遥控副载波。

式中 fsc——副载波频率;
φsc——副载波相位。
在早期深空系统中,测距伪码为单码结构。为了获得足够的距离解模糊能力,码长选择3 305 636chip和3 402 265chip。由于伪码周期长,所以伪码的捕获时间很长。为此,提出了复合伪码测距技术。
复合伪码由多个子码按照布尔代数运算逻辑构成,其周期为各个子码周期之积。复合伪码的捕获可以采用各个子码单独捕获、多个子码并行捕获的方式,这时复合伪码的捕获时间为最长子码的捕获时间。
CCSDS所推荐的复合伪码由6个子码复合而成,如表1-1所示,子码序列从左到右读取,如C3前3个码片全为1,最后1个码片是0。
表1-1 组成测距复合伪码的各个子码
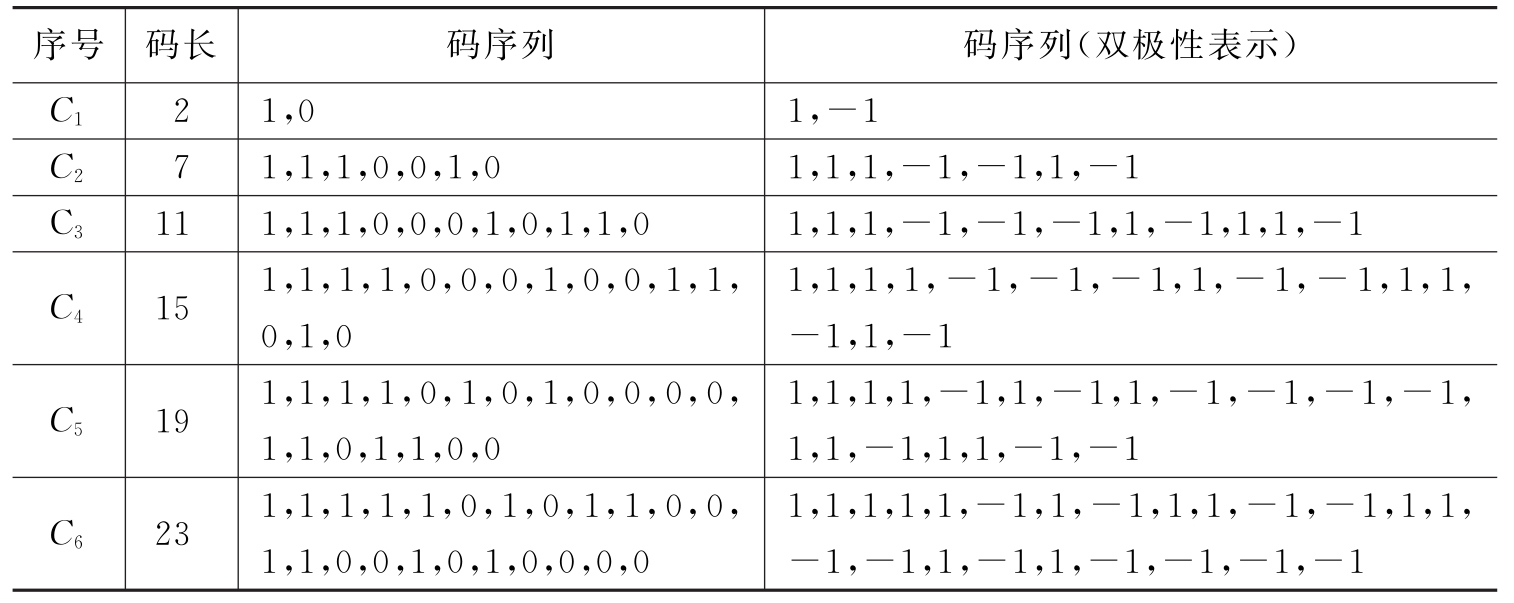
在测距过程中,每个子码不断重复,形成一个周期为λn的周期序列 。由于构成复合码的各个子码长度互为素数,所以复合码的周期L是各个子码周期λn(1≤n≤6)的乘积:
。由于构成复合码的各个子码长度互为素数,所以复合码的周期L是各个子码周期λn(1≤n≤6)的乘积:

伪码测距信号复合生成逻辑是由表1-1中给出的6个相同的具有周期性的成员序列通过一定的投票加权。
若将测距精度作为主要考虑因素,应当选择T4B(Balanced Tausworthe,γ=4)码,其组合逻辑如下式:

T4B码具有较强的测距时钟成分,可获得较高的测距精度。
若将伪码捕获时间作为主要考虑因素,应当选择T2B(Balanced Tausworthe,γ=2)码。复合逻辑如下式:

T2B码具有较弱的测距时钟成分,相对T4B,其捕获时间较短,而代价是测距抖动较大,测距精度略差。
2)测距流程
伪码测距属于再生伪码测距体制,地面测距单元产生测距伪码对上行载波进行相位调制,探测器应答机对上行信号进行接收解调,产生再生测距伪码,对下行载波进行调制。地面站接收解调下行载波,提取测距信号,与本地测距信号进行相关,得到测距信号收发时延,解算距离。
复合伪码体制下的距离模糊解算过程需要使用到中国剩余定理(又称孙子定理)。
中国剩余定理:假设有n(n≥2)个互素的整数mi(i=1,…,n),每一个mi对应存在一个整数wi,wi能够被除mi以外的(n-1)个数整除,且wi被mi除后余1。如果已知整数 相对于mi(i=1,…,n)的余数ci(i=1,…,n),则K可以通过mi(i=1,…,n)和ci(i=1,…,n)唯一确定:
相对于mi(i=1,…,n)的余数ci(i=1,…,n),则K可以通过mi(i=1,…,n)和ci(i=1,…,n)唯一确定:

假设被测距离为

式中 K由式(1-12)定义,取整数;
c——真空中的光速(m/s);
fRC——测距伪码时钟频率(Hz)。
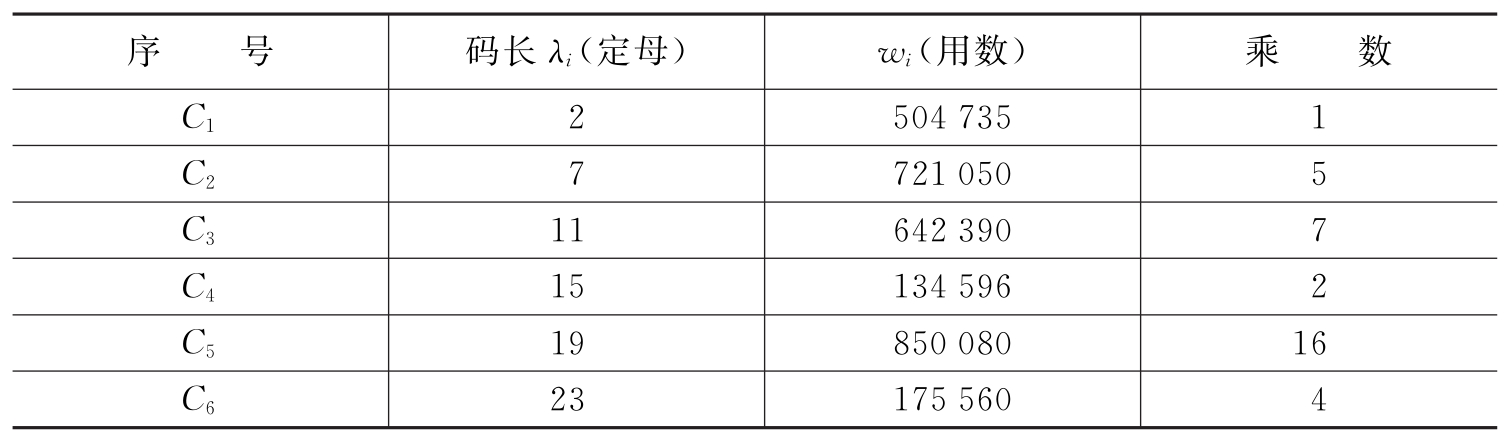
上述伪码测距体制中的伪码码长为λi(i=1,2,…,6),各个收发伪码分量所测得的伪码偏移量为ci(i=1,2,…,6)个码片(或者说是测距时钟波长),则:

上述伪码测距体制中,各个伪码码长λi所对应的wi如表1-2所示。
表1-2 伪码码长λi所对应的wi
测距过程中,各子码同时发送,得到各子码的测量值 :
:

式中 RRTLT——被测距离(m);
λnc/fRC——各子码的无模糊距离(m);
int(x)——对x的取整运算。
一般情况下![]() 不是整数(即尾数不为零),而中国剩余定理只能处理整数结果,所以,需要对各子码测量值首先进行取整运算后再应用中国剩余定理。例如,假设被测距离为1 009 000.5c/fRC,子码C5和C6测量值分别为5.4chip和13.6chip,进行取整运算,取子码C5和C6测量值分别为5chip和13chip,然后利用中国剩余定理解模糊,在解算结果上加上尾数0.4(或0.6)chip,得到最终测量结果。
不是整数(即尾数不为零),而中国剩余定理只能处理整数结果,所以,需要对各子码测量值首先进行取整运算后再应用中国剩余定理。例如,假设被测距离为1 009 000.5c/fRC,子码C5和C6测量值分别为5.4chip和13.6chip,进行取整运算,取子码C5和C6测量值分别为5chip和13chip,然后利用中国剩余定理解模糊,在解算结果上加上尾数0.4(或0.6)chip,得到最终测量结果。
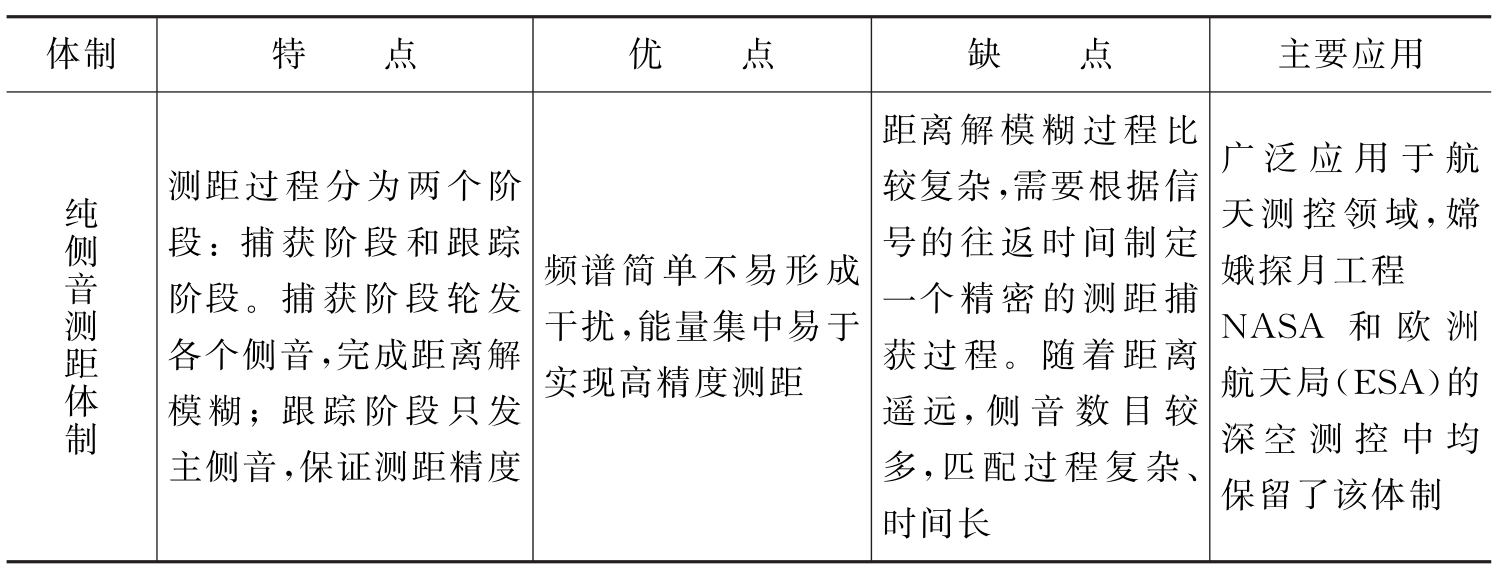
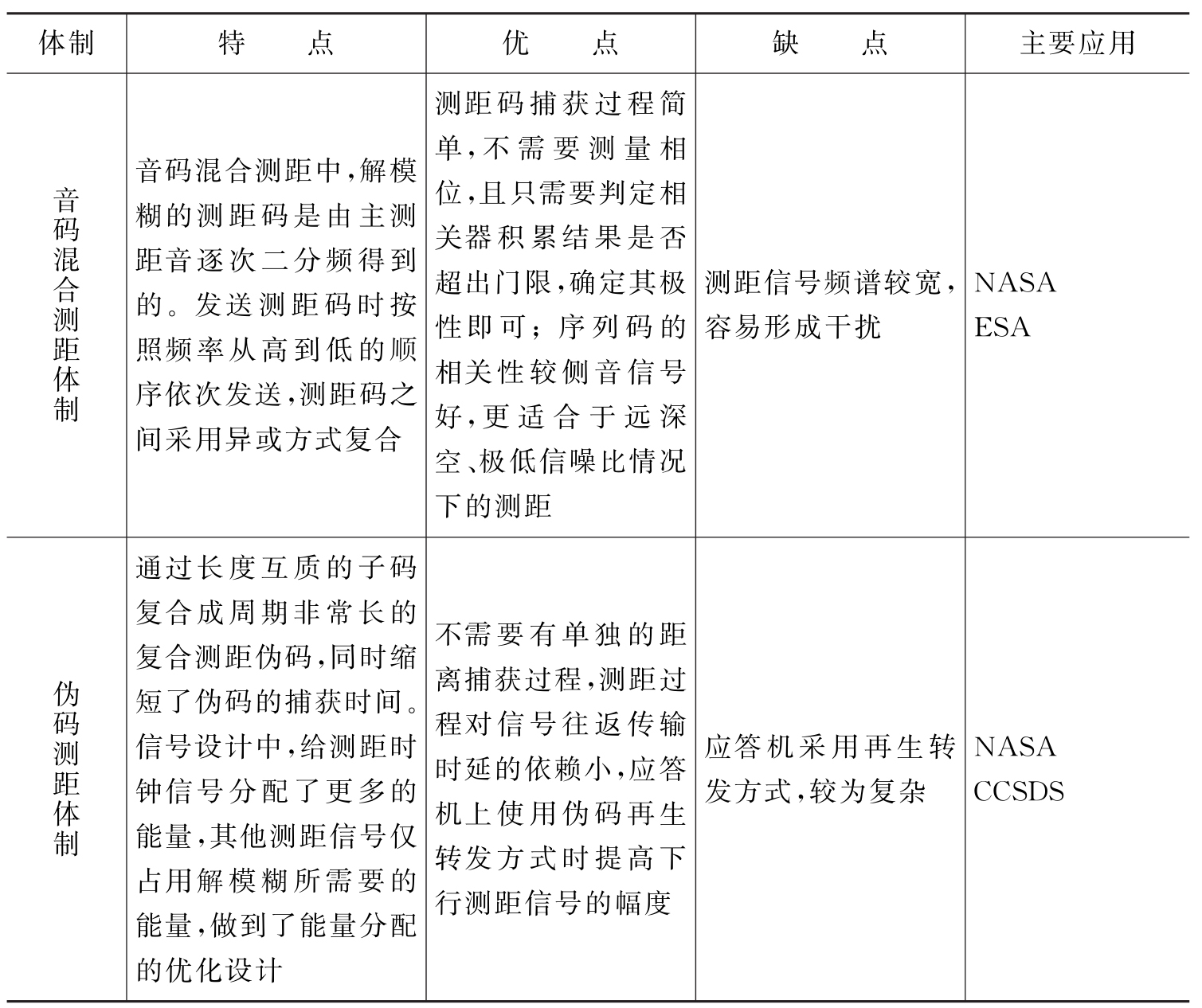
测距体制比较
表1-3给出纯侧音测距、音码混合测距和伪码测距的特点、优缺点及其主要应用。
表1-3 各种测距体制的比较
续表
链路功率的分配
纯侧音测距和音码混合测距上行链路的功率
由于纯侧音测距和音码混合测距的调制形式相同,其残留载波、测距音、遥控的功率分配是相同的。当副载波为正弦波时,残留载波、测距音、遥控占用的功率如下。
残留载波谱线功率:

式中 A——信号幅度;
mtc——遥控码调制指数;
mru——测距音调制指数;
J0(mtc)——变量mtc的零阶贝塞尔函数。
遥控信号一阶频谱功率:

式中 J1(mtc)——变量mtc的一阶贝塞尔函数。
测距信号一阶频谱功率:

当调制指数m<1时,m的零阶贝塞尔函数的拟合多项式为

m的一阶贝塞尔函数的拟合多项式为

高阶和交叉乘积项功率为

伪码测距上行链路的功率
伪码测距中伪码直接对载波进行调相,与纯侧音测距相比,残留载波功率、遥控功率表达式与侧音测距相同,而测距信号功率分配有所区别。
测距信号一阶频谱功率:

纯侧音测距和音码混合测距下行链路的功率
下行链路中残留载波谱线的功率:

式中 A——信号幅度;
mtm——遥测数据调制指数;
mrd——下行测距音调制指数;
J0(mtm)——变量mtm的零阶贝塞尔函数。
遥测信号一阶频谱功率:

式中 J1(mtm)——变量mtm的一阶贝塞尔函数。
测距信号一阶频谱功率:

伪码测距下行链路的功率
伪码测距中除测距信号功率表达式与纯侧音测距不同外,残留载波功率、遥测功率表达式与侧音测距是相同的。
测距信号一阶频谱功率如式(1-26)所示,在纯侧音测距、音码混合测距中,当侧音为方波时,其对应的各信号功率中零阶贝塞尔函数J0用cos m代替,一阶贝塞尔函数用sin m代替,m是遥测、遥控、测距的调制指数。
对于下行链路,星上应答机解调的测距侧音信号用自动增益控制将基带信号滤波并放大,再重新将测距侧音调制到下行载波上。自动增益控制的重要用途是保持下行载波抑制接近恒定,不随接收的上行信号电平变化。但是上行链路的热噪声也会通过测距侧音对载波的调制带到下行链路中。
可用的测距信号功率与总功率之比:

可用的遥测信号功率与总功率之比:

在上面这些公式中,mr为下行测距信道中测距信号的调制指数(弧度,rad),mn为下行测距信道中热噪声的调制指数(弧度,rad),θtm为遥测调制指数。
需要指出的是调制指数mr和mn是有效的调制指数,通常这2个指数都不等于下行测距调制指数的设计值mrd。实际上测距信道中的自动增益控制电路加强了如下约束:

也就是说,下行测距信道的总功率(测距信号功率加上信道带宽内的噪声功率)是一个恒定值,有效的下行调制指数为

式中 ΓU/L——应答机测距信道的信噪比。

式中 Br——下行测距信道(与噪声有关)带宽。
由于伪码测距形式中,在应答机中采用了伪码再生测距,因此,上行链路中测距通道的热噪声不带到下行测距通道中,其下行链路设计的伪码调制指数就是实际下行链路的测距调制指数。
链路功率分配原则
以下行链路为例,遥测、测距等信号的功率分配原则通常有下列几种:
- 各副载波同时达到门限,即同时门限准则,门限指达到给定指标所要求的C/N0值,例如(C/N0)tm为达到遥测误码率所要求的C/N0值;
- 保证残留载波有足够功率,以保证捕获、测速和测角;
- 使副载波一阶边带功率最大。
设计时可根据工程的需要选取不同的准则。
采用改变调制指数的大小来对各分量进行功率分配,调整时可以使其中比较重要的信号(例如载波谱线)功率得到较大的冗余量。同时,因为Px是浪费掉的功率,应保持愈小愈好,一般应以不超过总功率的15%为佳,最大不超过20%。
测距模式
如图1-5所示,对深空探测器进行距离测量时,由同一个地面测控站发送上行信号并接收下行信号来完成距离测量的方式称为双向测距(图1-5(a))。随着深空探测距离的增加,受地球自转的影响,测控站发射信号后不再能接收到探测器返回的信号,需由另一个测控站完成信号接收;或者,由于其他原因需要利用不同测控站分别完成测距信号的发射和接收,这种距离测量方式称为三向测距(图1-5(b))。
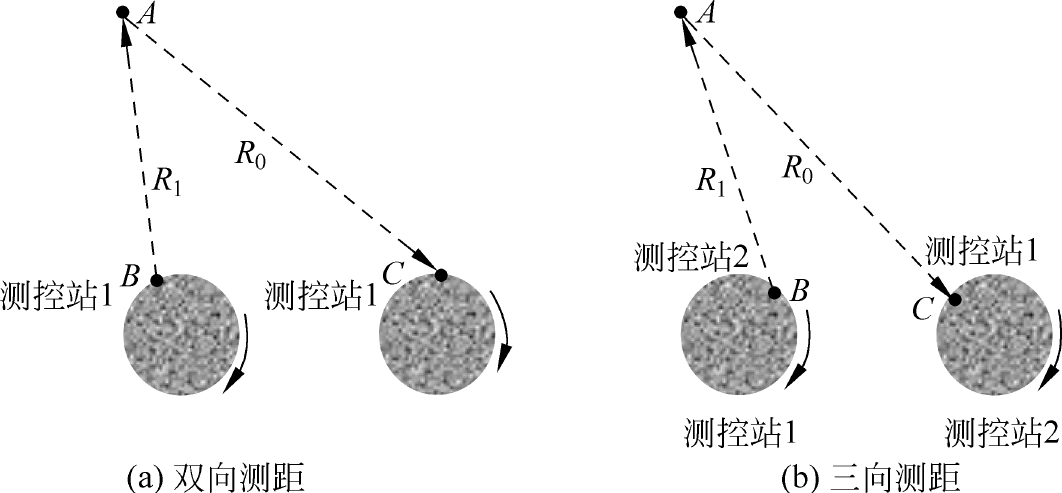
图1-5 双向测距与三向测距
假设测控站发送信号时刻测控站位置为B,探测器接收到信号时刻探测器位置为A,测控站接收到返回信号时刻测控站位置为C,无论是双向测距还是三向测距,距离测量结果的含义为空间距离BA与AC之和,时标可以定义为测控站发送信号时刻或接收信号时刻。
与双向测距过程相比,三向测距时信号发射站和接收站采用不同的时间和频率标准,导致测距误差增大。
基本工作原理
设测距信号频率为fR,整秒点t1时刻发射测控站测距信号的相位为φtx(t1),探测器到2个测控站的往返光行时(RTLT)为RTLT(t1)。
定义Δt∈[0,1)(s),经过RTLT(t1)+Δt后,在接收测控站的整秒点t2(t2=t1+RTLT(t1)+Δt)时刻,发射站和接收站的测距信号相位可以分别表示为

式中 RTLT(t2)——t2时刻探测器到2个测控站的往返光行时。
所以,可以得到t2时刻收发测距信号的相位差:

式中 RTLT(t1)+Δt——整秒倍时间,且大于t1时刻的往返光行时。
当测距信号频率为整周频率时,其值为2π的整数倍,所以该项可以省略,式(1-35)变为

综上,三向测距信号相位差的测量过程如下:采用整周频率的测距信号,在发射测控站整秒点t1时刻,获得发射信号相位φtx(t1),并记录;在接收测控站整秒点t2时刻,获得接收信号相位φrx(t2),并记录;通过处理2组相位记录数据,得到t2时刻探测器距离。
站间时间同步精度对测距精度的影响
从三向测距的工作原理可知:设t1是发射测控站信号相位测量时刻,t2是接收测控站信号相位测量时刻,则要求t2-t1为整秒倍数。在进行距离测量之前,根据探测器的往返光行时等参数确定t1和t2时刻。测距过程中,发射测控站和接收测控站分别按照各自的时间标准对发信号和收信号进行相位采样,所以2个测控站之间的时间同步误差将直接转化为测距误差。例如,10ns的时间同步误差将导致约3m的测距误差。
对于三向测距体制,站间时间同步误差成为测距系统的主要误差源之一,深空站间配置GPS共视接收机作为站间时间同步的手段,时钟同步精度优于20ns。