步进电机的功能概要(地位、控制原理、驱动器功能结构)
步进电机的地位
电机有各种分类方式,如用电压种类分类时,有AC驱动与DC驱 动;用旋转速度与电源频率关系分类时,则有同步电机和异步电机。
如下图是步进电机在小型电机系列中的位置关系。
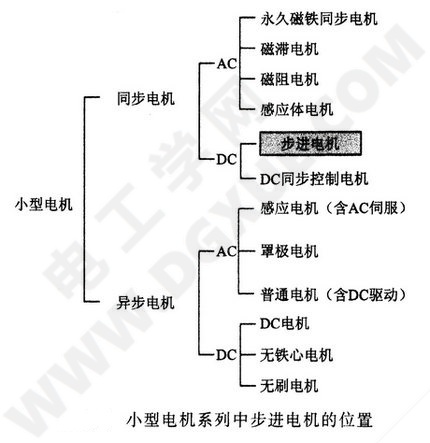
由上图可知,步进电机属于DC驱动的同步电机,但无法直接用DC或AC电源来驱动,需要配备驱动器才能使用。所以步进电机的运行需要驱动电路。此点与无刷DC电机相同,无刷DC电机要使用驱动电路,驱动电路将电机定子与DC电源连接在一起工作。
驱动电路的功能
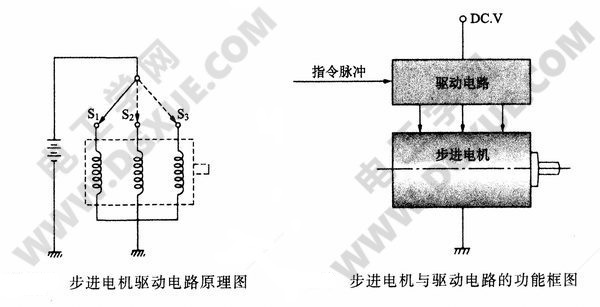
步进电机驱动电路的任务,是按顺序指令切换DC电源的电流流入步进电机的各相线圈。下左图为三相VR型步进电机的绕组外加电源示意图,其中驱动电路用开关来表示。
左图中开关S1为ON时,第1相的绕组导通,如切换第2相绕组电流的指令,S1将打开变为OFF状态,S2变成ON状态。如此,电机转子就旋转一个固定角度,此只由定子极数与转子齿数的关系来决定的旋转角度,即为电机转动固有的步距角。同样,S3顺序打开为ON状态,S2转为OFF状态,电机转子又转过一个步距角。依次进行,电路每切换一次,电机就以固有的角度转动一步。
若切换n次,转子就旋转步距角的n倍角度;如果没有发出指令,转子则停止转动。电机以步距角为一步,此旋转角度的大小由电机结构来决定,如果将负载连接在电机轴上,就可以对负载进行旋转角度的位置控制;改变开关切换速度(即脉冲频率)就可改变旋转速度,故改变速度,就是要改变左图的开关的切换频率,即开关的切换频率与转子转速成正比。
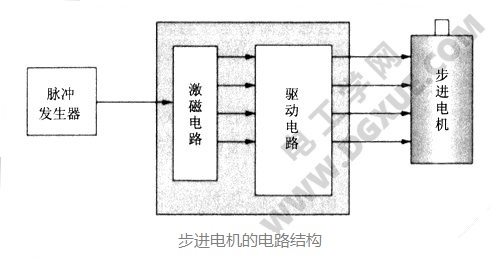
开关的切换频率向来是由驱动电路的指令脉冲频率来决定的。此种脉冲频率以pps(pUlse per second)为单位。pps为每秒脉冲数。右图为步进电机与驱动电路的功能框图。
位置控制与速度控制
步进电机的位置控制与速度控制可根据上节的原理按如下操作进行:
- 步进电机的位置控制依指令脉冲的总数而定。
- 步进电机的速度与指令频率的pps成正比。
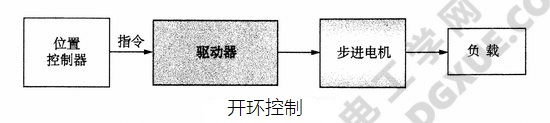
- 由指令脉冲可以进行位置和速度控制,不需反馈电路即开环控制。
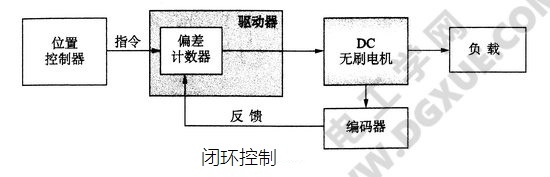
DC电机或无刷电机要作位置控制和速度控制时,转子的位置或速度的信号必须反馈给控制器,即要加反馈传感器,如下图所示的闭环控制系统才可以实现。
相对的,如下图所示的开环控制不必特别在转子上加装位置或速度传感器电路,因此,包含驱动电路的步进电机的整体费用一般比较便宜。
开环控制的原理
当步进电机的定子一相绕组流过直流电流时,最接近该相的转子齿被定子相吸引,因产生的电磁转矩大于负载转矩,从而使转子运动。当转子转动到电磁转矩与负载转矩平衡位置时,转子就静止不动了,此电磁转矩也就把负载转至需要定位的位置。然后再对下一相施加激磁电流,另外一个最接近该相的转子齿被吸引,负载被该相电磁转矩驱动,移动1个步距角,到达下一个静止位置。激磁相切换的次数与频率决定了转子旋转的最终角度与速度。步进电机的步距角由定子的相数与转子的齿数决定,详细内容将在下一章说明。切换相的次数与步距角的乘积为步进(专有名词为步动作增加的角度)角度,此值决定最终静止位置。相对负载转矩来说,如步进电机产生的转矩足够大,则切换指令就能驱动负载,作位置控制。此时的位置平衡力是由步进电机静态转矩产生的。
如下图表示两相PM型步进电机的各相矩角特性曲线的情况。当“杠A”相绕组激磁时,要使带负载的转子产生位移,负载应在转子与A相的作用力范围内。“杠A”相激磁绕组通电时的定子与转子的位置关系如图上部所示。激磁相“杠A”的矩角特性用实曲线表示;其他相绕组激磁时,产生的矩角特性曲线用虚线表示。
在轻载或空载时,静态转矩由所在位置决定,故“杠A”相转矩沿曲线箭头方向移动到其与横轴的交点C1点;实际上,转子停在转矩曲线上负载平衡点。
依次,B相如果激磁,则转子停在点b1点,b1-C1的角度差为步距角。
变速控制可使用开环控制(OPEN LOOP)方式,改变速度只需要改变切换频率的指令,相当于变频同步电机的功能。

驱动器的基本结构
步进电机驱动器的基本电路结构如下图所示。步进电机直接连接交流或直流电源时不会运动,必须与驱动电路同时使用才能发挥其功能。驱动器(驱动电路)由决定换向顺序的控制电路(或称为逻辑电路)与控制电机输出功率的换相电路(或称为功率电路(power stage))组成,其详细内容将在后面章节介绍。
如下图为三相VR型、两相HB型步进电机恒电压驱动器的早期产品外观。

脉冲发生器产生指令脉冲。当步进电机要按一定速度运行时,只要产生一定频率的连续脉冲,就可以决定步进电机的总旋转角度、停止位置、加速、勻速、减速等的变速过程。由于该脉冲发生器可以控制脉冲频率,故又称为控制器。
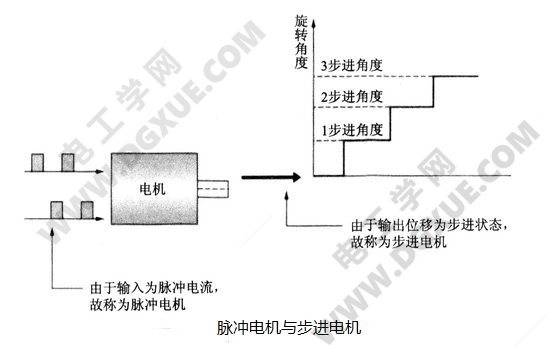
20世纪70年代,步进电机也称为脉冲电机,此种称呼是由于电机的输入指令是脉冲信号或电机绕组电流为脉冲电流。步进电机的称呼源于转子的输出动作,即转子一步一步旋转运动的关系。脉冲电机与步进电机的概念如下图所示。
看了本文的人还看了
- 视频:直流电动机的构造
- 视频:单相异步电动机
- 视频:同步电动机
- 视频:三相异步电动机的铭牌数据
- 视频:三相异步电动机的构造
- 应用于自动机械、医疗器械及游戏机中的步进电机
- 旋转、摆动照明灯具中使用的步进电机
- 监控摄像机中使用的步进电机
- FDD(软盘驱动器)中使用的步进电机
- 打字机中使用的步进电机
- 传真机中的步进电机
- 复印机中的步进电机
- 步进电机位置定位精度的解决方法
- 步进电机改善暂态特性的解决方法
- 降低步进电机振动、噪音的解决方法
- 步进电机增加动态转矩的解决方法
- 选择步进电机的计算方法(附例题)
- 电机选择:根据使用环境来选用步进电机
- 电机选择:从转速变化率来选用步进电机
- 电机选择:从转速来选用步进电机
- 电机选择:步进电机位置定位精度的选用
- 根据步进电机种类、优缺点来选择电机
- 步进电机噪音、振动、速度变化的测量方法
- 步进电机暂态(阻尼)特性的测量
- 步进电机步距角度精度的测量
- 步进电机动态特性的三种测量方法
- 步进电机的静态转矩特性及测量方法
- 三相步进电机的驱动电路
- 步进电机附加制动驱动方法:反相序激磁与最终步进延迟
- 步进电机的加速、减速控制
 鄂网公安备 42112502000017号
鄂网公安备 42112502000017号