步进电机步距角度精度的测量
角度测量法
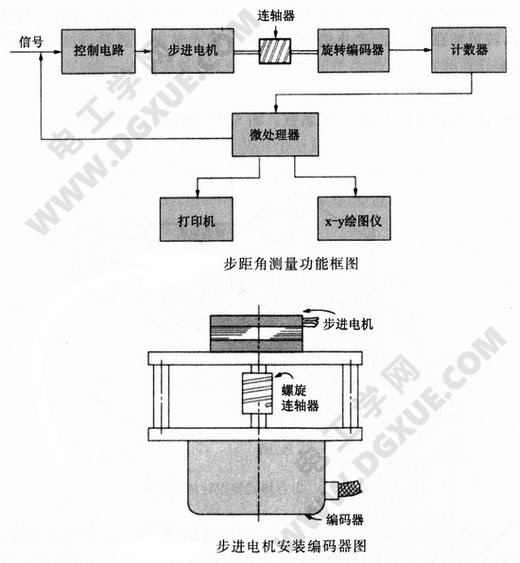
步进电机用作位置定位控制时,前述的静态转矩特性为最重要的特性。步进电机的角度精度,能用高分辨率的编码器通过连轴器(使转动时不会发生旋转位移现象)直接连接,角度作为数字,读入计数器,用计算机进行计算。结果通过打印机或X-Y绘图仪等设备输出,作为电机的评价资料。
下图为功能框图,与步进电机安装编码器图。
步距角精度测量法
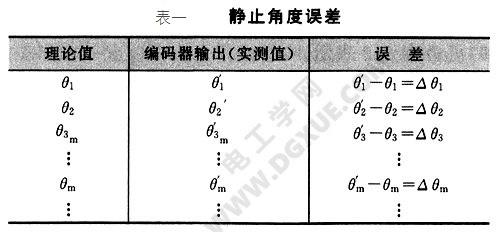
位置精度:转子的任意点作为出发点,由此每一步测量一次,电机连续旋转一圈,求转子的实际位置与理论位置的差。用正最大值与负最大值范围表的误差,称为位置误差(position),用基本步距角的百分率(%)来表示。下表表示静止角度误差:
下图表示误差与位置精度:

上图中,若正的最大误差为Δθ1,负的最大误差为Δθ4,则位置精度PA由下式表示:
![]()
步距角精度:转子从任意一点出发,连续运行时,求出各步进角度的实测角度与理论上的步进角度之差,用理论步距角的百分率(%)表示,称为步距角精度,以1圈中的(+)侧与(一)侧的最大值表示。
上式可有下表表示:
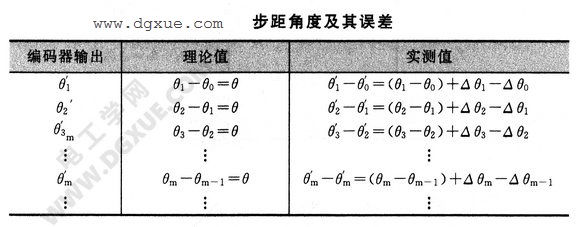
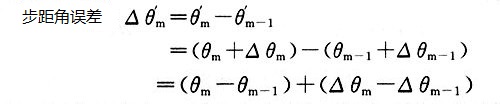
即上式的第一项为步距角理论值,(θm-θm-1)=θs。第二项为静止角度(位置)误差的相邻误差,变成步距角误差。步距角误差取(+)或(-)值,(+)或(-)的最大值与步距角之比的百分数(%)称为步距角精度。(表1)的步距角精度SA用下式描述:

滞环误差:转子由任意点正转1圈后,再反向旋转一圈返回原点,各测量位置的偏差角中取最大值,称为滞环误差。上“误差的表示与位置精度图”中的H即为滞环误差。
实际的角度精度
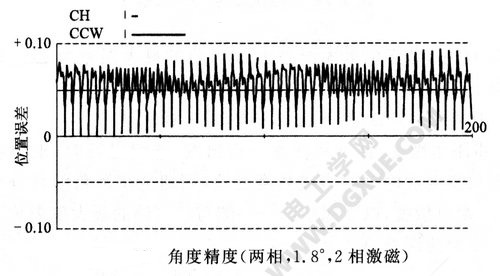
上图表示两相HB型1.8°步进电机的2相激磁角度精度。有每4步进精度的描述,即各相位置定位如下图所示。

上图的角度误差有4步进的周期性,其是由步进电机绕组相间磁阻偏差大所造成的。分别取出4组来看,如图中所示。并非全步进位置决定定位,如果容许分辨率低,釆用每隔4步进的位置定位,位置精度改善1/4。每隔2步进精度会提高,这也是位置精度改善的对策。
看了本文的人还看了
- 视频:三相异步电动机的转矩和机械特性
- 应用于自动机械、医疗器械及游戏机中的步进电机
- 旋转、摆动照明灯具中使用的步进电机
- 监控摄像机中使用的步进电机
- FDD(软盘驱动器)中使用的步进电机
- 打字机中使用的步进电机
- 传真机中的步进电机
- 复印机中的步进电机
- 步进电机位置定位精度的解决方法
- 步进电机改善暂态特性的解决方法
- 降低步进电机振动、噪音的解决方法
- 步进电机增加动态转矩的解决方法
- 选择步进电机的计算方法(附例题)
- 电机选择:根据使用环境来选用步进电机
- 电机选择:从转速变化率来选用步进电机
- 电机选择:从转速来选用步进电机
- 电机选择:步进电机位置定位精度的选用
- 根据步进电机种类、优缺点来选择电机
- 步进电机噪音、振动、速度变化的测量方法
- 步进电机暂态(阻尼)特性的测量
- 步进电机动态特性的三种测量方法
- 步进电机的静态转矩特性及测量方法
- 三相步进电机的驱动电路
- 步进电机附加制动驱动方法:反相序激磁与最终步进延迟
- 步进电机的加速、减速控制
- 步进电机闭环控制系统
- 步进电机三相细分驱动时的转矩
- 步进电机:细分步进驱动
- 步进电机的激磁方式
- 步进电机单极驱动与双极驱动比较
 鄂网公安备 42112502000017号
鄂网公安备 42112502000017号