步进电机闭环控制系统
步进电机基本上以开环电路驱动,用于位置控制。换句话说,步进电机以外的电机尤其是高精度的步进电机之外并没有做开环控制定位的,而用开环电路驱动的电机只有步进电机。例如无刷电机,首先为切换相,需要测出转子位置,需要含位置传感器的位置闭环电路。而且如果按一定速度驱动,需测出转子的速度,此为速度闭环电路;如果想定位控制,需要含有转子位置信号的编码器等传感器的闭环电路。与开环驱动的步进电机相比较,含传感器的闭环电路成本较高。因此,步进电机被称为速度控制或位置控制的低成本驱动系统。
步进电机的开环电路驱动在高速转动时,有失步、振动(噪声)以及高速运行困难等问题。为了弥补这些缺点,步进电机安装角度传感器,形成闭环控制,用以检测并避免失步。步进电机的闭环控制方式大致分为两种:
- 使激磁磁通与电流的相位关系保持一致,使其产生能带动负载转矩的电磁转矩,这种控制电机电流的方式与无刷直流电机控制方式相同,称为无刷驱动方式或电流闭环控制方法。
- 电机电流保持一定,控制激磁磁通与电流相位角的方式,称为功率角闭环控制方法。功率角为转子磁极与定子激磁相(或认为是同步电机的定子旋转磁场轴线也可以)相互吸引所成的相位角。此功率角在低速时或轻载时较小,高速时或高负载时较大。引用前文开环控制的原理部分中的下图所示,“杠A”相吸引转子磁极,其次“杠B”相激磁时的角度有π/2,转子磁极位于“杠A”相前缘(图中转子的S极位于A相的左侧)时,使磁极“杠B”相开始激磁。
 为什么?因为高速时,受线圈电感的影响,使A相电流的关断时间延长,B相电流上升时间也延长,因此,产生最大转矩加速的角度,其值随速度变快而变大。
为什么?因为高速时,受线圈电感的影响,使A相电流的关断时间延长,B相电流上升时间也延长,因此,产生最大转矩加速的角度,其值随速度变快而变大。
 为什么?因为高速时,受线圈电感的影响,使A相电流的关断时间延长,B相电流上升时间也延长,因此,产生最大转矩加速的角度,其值随速度变快而变大。
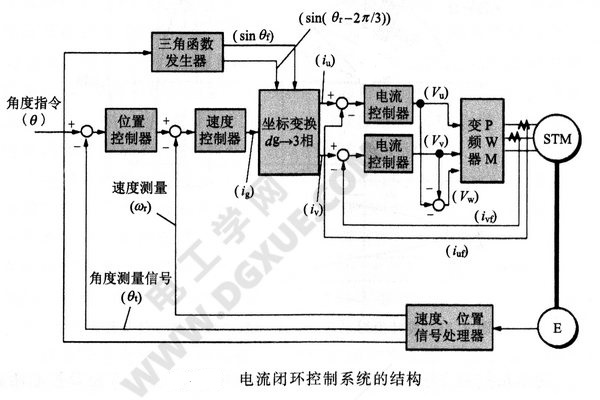
为什么?因为高速时,受线圈电感的影响,使A相电流的关断时间延长,B相电流上升时间也延长,因此,产生最大转矩加速的角度,其值随速度变快而变大。电流闭环控制方法与交流伺服控制方法相同,通过电流控制环(转矩控制)适应负载的变化。如下图表示三相步进电机的电流闭环控制系统的结构。
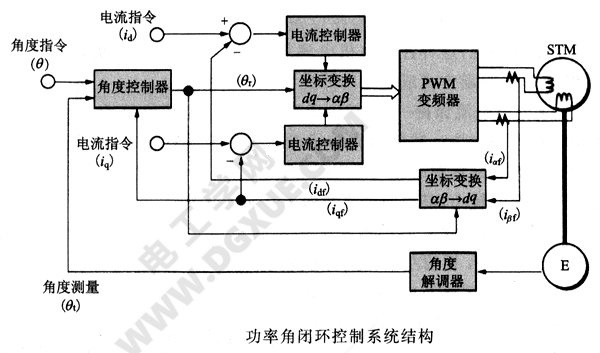
下图表示两相步进电机的功率角闭环控制系统的结构,这是日本伺服(股份)公司步进电机的闭环控制产品,电流控制使用轴坐标变换得到功率角。
下图为旋转坐标系与静止坐标系之间转换的向量图。
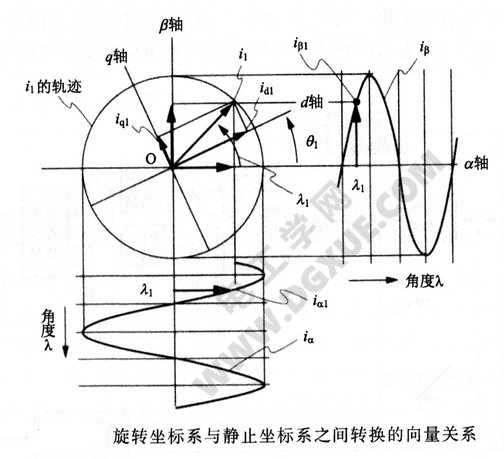
功率角控制方法中,电机电流一方面保持不变,另一方面要控制激磁磁通与电流相位角的变化。
恒定电流用于两相细分驱动,两个相差90°相位角的正弦波相电压加于两相绕组上。上图表示静止坐标系与旋转坐标系之间的关系。两相步进电机的绕组称A、B相,按照两相固定坐标系的互相垂直(α轴、β轴)轴名的称呼,2相绕组称为α、β相。
α相、β相电流iα=I1cosλ,iβ=I1sinλ流入绕组,当定子的合成电流i1旋转到λ1角度位置时,产生的电流向量在α、β相轴上的投影为iα1、iβ1。相应的转子磁极位置在θ1的方向,转子定义为旋转坐标系,其磁极的方向定义为d轴,逆时针旋转90°的方向定义为q轴,求得电流向量i1(相当定子激磁相或旋转磁场轴)在d轴和q轴上的投影id1、iq1。随着转子的转动θ1随时间而变化,与电机速度相一致,而dq坐标也随着转子旋转,d轴分量始终为磁通方向分量,q轴分量始终与磁极垂直,成为与电磁转矩成正比的值(转矩电流)。通常的无刷直流电机将电流i1方向控制在q轴方向上(故d轴与i1互相垂直),若负载转矩恒定,则电流变成直流,步进电机的电流i1的方向由外部角度指令来决定,要想产生平衡负载转矩的q轴电流,需要转动dq轴。
以HB型步进电机为例,步进电机的转子齿数Nr=50时,其转子极数为100,是交流伺服电机极数(2~10个)的10倍以上。因为步进电机与永磁同步电机的原理相同,所以控制电路结构也相同,但由于电流闭环控制器限制了系统的响应,随速度的上升,电流闭环控制系统的控制误差会增大。即HB型步进电机为同步电机的一种,又比交流伺服电机的极数多很多,当高速旋转时,很难维持闭环运行。电机转子旋转时,电机绕组会产生反电动势,随着电机转速的上升,反电动势也会增大,导致电源电压调节范围减小,进而导致步进电机相电流失控。
相对步距角闭环控制方式,按照步进电机转子的运动位置(激磁磁通位置),在适当的位置给各相通激磁电流,有不会受到电流闭环控制制约的优点。但与按照负载的变化增减电流的电流闭环控制系统不同,它存在轻载时效率低的缺点。因此,低速时用电流闭环控制,高速时,用步距角闭环控制,尤其在步进电机静止时,保持激磁电流恒定,可以产生保持力矩,并可以随时按照动作条件,切换控制方式。
通常步进电机具有价格低、位置控制稳定等优点。其驱动电路大都结构简单,如果步进电机如上述使用闭环控制,与交流伺服电机的电路结构相同,就没有了价格优势。近年电脑控制的性能提高,低价数字控制系统已经实用化。与交流伺服电机系统一样,采用轴(旋转坐标)上的功率角矢量控制,已作为转矩控制的方法。
看了本文的人还看了
- 视频:三相异步电动机的转矩和机械特性
- 应用于自动机械、医疗器械及游戏机中的步进电机
- 旋转、摆动照明灯具中使用的步进电机
- 监控摄像机中使用的步进电机
- FDD(软盘驱动器)中使用的步进电机
- 打字机中使用的步进电机
- 传真机中的步进电机
- 复印机中的步进电机
- 步进电机位置定位精度的解决方法
- 步进电机改善暂态特性的解决方法
- 降低步进电机振动、噪音的解决方法
- 步进电机增加动态转矩的解决方法
- 选择步进电机的计算方法(附例题)
- 电机选择:根据使用环境来选用步进电机
- 电机选择:从转速变化率来选用步进电机
- 电机选择:从转速来选用步进电机
- 电机选择:步进电机位置定位精度的选用
- 根据步进电机种类、优缺点来选择电机
- 步进电机噪音、振动、速度变化的测量方法
- 步进电机暂态(阻尼)特性的测量
- 步进电机步距角度精度的测量
- 步进电机动态特性的三种测量方法
- 步进电机的静态转矩特性及测量方法
- 三相步进电机的驱动电路
- 步进电机附加制动驱动方法:反相序激磁与最终步进延迟
- 步进电机的加速、减速控制
- 步进电机三相细分驱动时的转矩
- 步进电机:细分步进驱动
- 步进电机的激磁方式
- 步进电机单极驱动与双极驱动比较
 鄂网公安备 42112502000017号
鄂网公安备 42112502000017号