步进电机:细分步进驱动
细分步进驱动有时也被称为微动驱动,最近已统一为细分步进驱动。细分步进驱动是将全步进驱动时的步距角各相的电流以阶梯状n步逐渐增加,使吸引转子的力慢慢改变,每次转子在该力的平衡点静止,全步距角作n个细分,可使转子运行效果光滑,因此,在低速运转时,此法可认为是降低振动的有效手段之一。
下图表示两相式步进电机的4细分微步进的各相电流波形的概念图。各相电流值的峰值相等,相位偏差90°。此电流的大小并非必须均等增加,通常其平均曲线会变成正弦波。
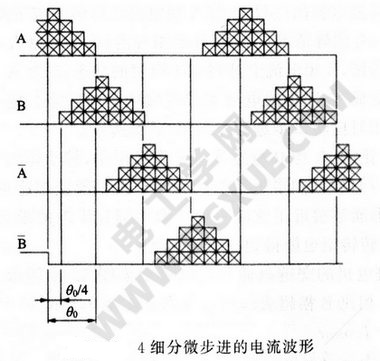
改变此电流值的手段与前文所示电路图的恒电流斩波器部分相同,预先控制输出电路,确定电流波形。上图所示为供给2相式步进电机细分电流,下图为转子细分步进的情况。
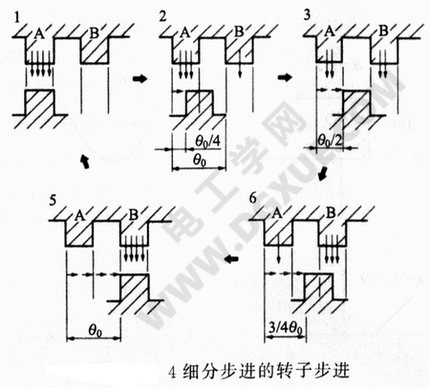
上图中,1为前文第一张图的A相电流峰值时的状态;2为A相电流由1段的峰值电流减少变成3/4阶段的电流,同时B相的电流从零开始增加到1/4的峰值电流的过程;3为A相电流由峰值电流下降到1/2峰值, B相的电流上升到峰值的1/2,两电流相等的状态;4为A相电流由继续 下降成1/4峰值,B相电流上升到3/4峰值的状态;5为A相电流由峰值时电流减少变成零,B相的电流增加变成峰值时状态。定子的各相激磁电流大小与相对应转子步进情况如本文第一图所示。
此时,简化图,A相B相的节距θ0作步距角,转子每次电流各变化一次,每步进θ0/4,即已知步距角的四分之一。一般使用这种细分方法,可以使电流波形能够接近正弦波。此处增加细分步级的细分量,电流能近似正弦波,旋转转矩也能得到正弦波变化。
2相步进电机的交链磁通与电流模型如下图所示。
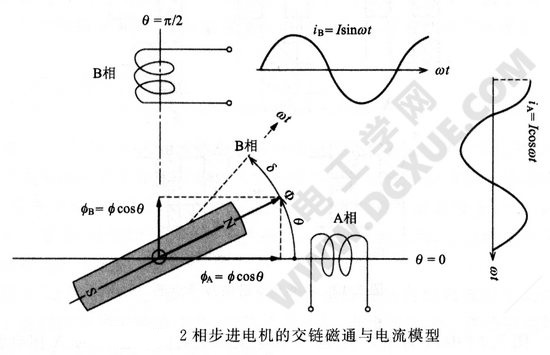
电流以角速度ω表示,A相比B相超前(π/2),电流公式如下所示:
iA=Icosωt
iB=Isinωt
激磁磁通在A相与B相交链部分,考虑相位相差π/2,根据上图变成下式:
ΦA=Φcosθ
ΦB=Φsinθ
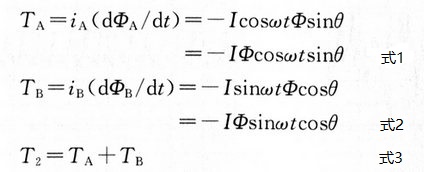
设A相转矩为TA,B相转矩为TB,2相微步进驱动时的合成转矩为T2,考虑最简单模型,令式(T1=NNrI(dΦ/dθ))中的N=1,Nr=l,则转矩公式如下所示:
转子与定子的转动磁场同步,以负载角δ(如前文《PM型电机转矩的产生及负载角》及文《HB型电机的转矩与负载关系》的图中δ)转动,下式成立:
θ=ωt-δ
将上式3代入式1、式2,及θ=ωt-δ得下式:

即T2为含ω的项消去,δ取一定值,能得到近似正弦波的转矩。上式(T2=IΦsinδ)表示前文《PM型电机转矩的产生及负载角》及文《HB型电机的转矩与负载关系》的图中转矩,如增加负载,δ也增加,至π/2时为其最大值。
以上细分步进驱动方式是降低振动极为有效的手段。此时,永久磁铁所产生的磁通分布假定为正弦波。HB型步进电机的转子在dq轴方向分离成两个磁通,并且磁极上有很多的齿,容易产生高次谐波,因此,除式T2=IΦsinδ所示的值外,还含有其他频率成分的磁场。
如上所述的细分步进驱动,降低振动的要点如下:
第一、细分步进越是在低速运行时效果越好。2相步距角0.9°(定子主极数16)的步进电机转速约150rpm以上,其减少振动量的效果就不明显。如输入脉冲频率太快,对细分步进波形来说,由于不能得到希望的电流波形,会使电机跟踪精度变差。
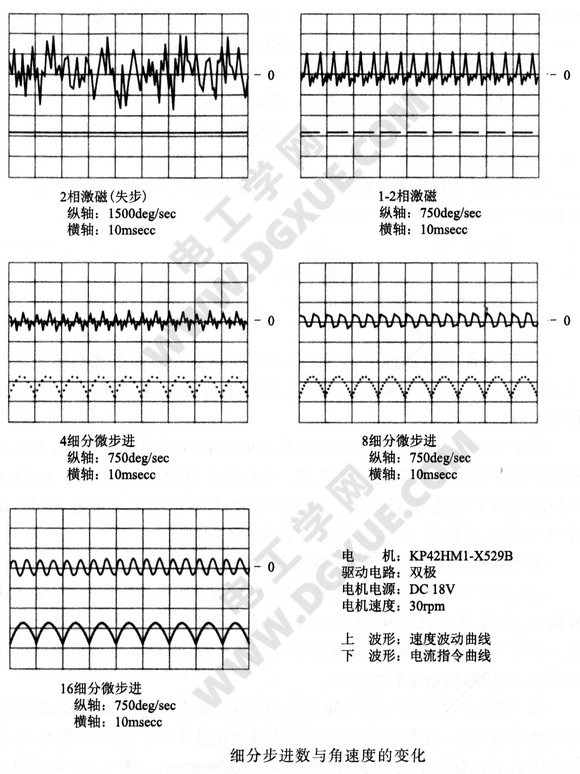
第二、细分步进的细分数与降低振动效果:理论上细分数越多,降低振动的效果越明显,但实际到8细分时效果变化并不大。例如8细分与16细分以上不会有效果的差别(即没有什么效果变化)。下图表示两相HB型16主极的0.9°步进电机细分数与速度波动的图像;
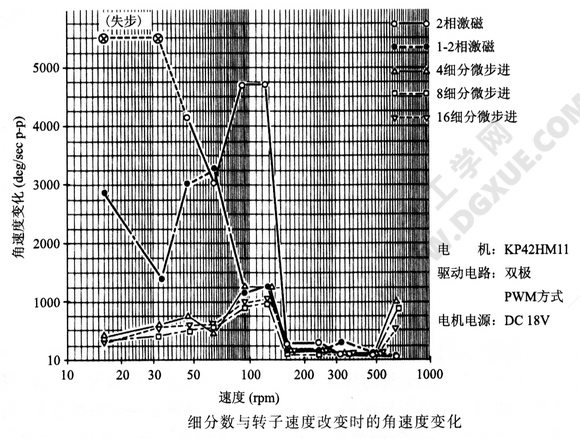
下图表示改变细分数与转子速度变化情况,电机同样为两相HB型16主极的0.9° 步进电机。两者皆为2相激磁,1-2相激磁,4细分时没有看到大的差别。由上图可以看出,转数在150rpm以上时,步距角为0.9°的电机虽然激磁方式发生变化,但速度变化差别不大。
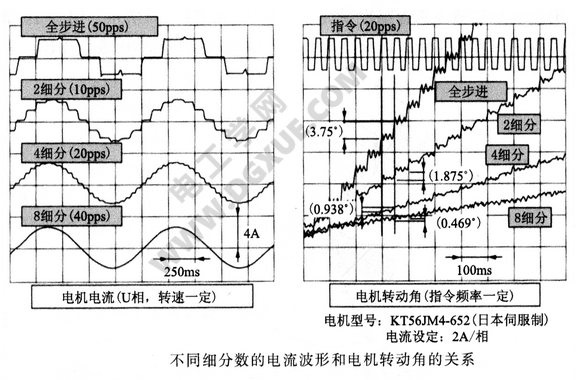
下图表示三相HB型步距角3.75°时的全步距角,2细分、4细分、8细分时的电流波形和电机转动角的波形。可以看出,电流波形8细分时接近正弦波。细分步进的细分数是决定驱动电路的复杂程度和成本的原因之一,应该根据使用目的和转速来合理选用不同的驱动电路。
第三、细分的角度虽然能定位,但其精度不高,因此定位控制时,用细分的2相或1相导通方式来定位。
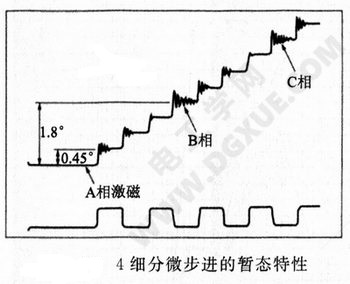
第四、相同情况下,细分步进时的各步(step)暂态特性因包含1相激磁或2相激磁等工作状态,故过渡过程并不一样。此种情况如下图所示。
看了本文的人还看了
- 应用于自动机械、医疗器械及游戏机中的步进电机
- 旋转、摆动照明灯具中使用的步进电机
- 监控摄像机中使用的步进电机
- FDD(软盘驱动器)中使用的步进电机
- 打字机中使用的步进电机
- 传真机中的步进电机
- 复印机中的步进电机
- 步进电机位置定位精度的解决方法
- 步进电机改善暂态特性的解决方法
- 降低步进电机振动、噪音的解决方法
- 步进电机增加动态转矩的解决方法
- 选择步进电机的计算方法(附例题)
- 电机选择:根据使用环境来选用步进电机
- 电机选择:从转速变化率来选用步进电机
- 电机选择:从转速来选用步进电机
- 电机选择:步进电机位置定位精度的选用
- 根据步进电机种类、优缺点来选择电机
- 步进电机噪音、振动、速度变化的测量方法
- 步进电机暂态(阻尼)特性的测量
- 步进电机步距角度精度的测量
- 步进电机动态特性的三种测量方法
- 步进电机的静态转矩特性及测量方法
- 三相步进电机的驱动电路
- 步进电机附加制动驱动方法:反相序激磁与最终步进延迟
- 步进电机的加速、减速控制
- 步进电机闭环控制系统
- 步进电机三相细分驱动时的转矩
- 步进电机的激磁方式
- 步进电机单极驱动与双极驱动比较
- 步进电机的恒电流驱动
 鄂网公安备 42112502000017号
鄂网公安备 42112502000017号