步进电机的基本特性:静态、动态、暂态转矩特性
步进电机的基本特性包括电机静态特性、连续运动特性(动态特性)、电机启动特性和电机制动特性(暂态特性)。下面分别作介绍:
静态转矩特性
步进电机的线圈通直流电时,带负载转子的电磁转矩(与负载转矩平衡而产生的恢复电磁转矩称为静态转矩或静止转矩)与转子功率角的关系称为角度-静止转矩特性,这就是电机的静态特性。如下图所示:
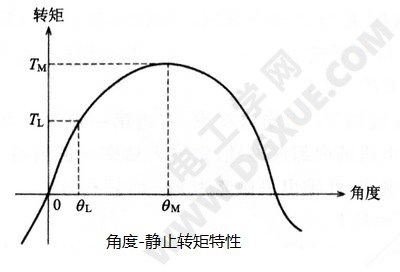
因为转子为永磁体,产生的气隙磁密为正弦分布,所以理论上静止转矩曲线为正弦波。此角度-静止转矩特性为步进电机产生电磁转矩能力的重要指标,最大转矩越大越好,转矩波形越接近正弦越好。实际上磁极下存在齿槽转矩,使合成转矩发生畸变,如两相电机的齿槽转矩为静止转矩角度周期的4倍谐波,加在正弦的静止转矩上,则上图所示的转矩为:
TL=TMsin[(θL/θM)π/2]
其中TL与TM各表示负载转矩和最大静止转矩(或称把持转矩),相对应的功率角为θL和θM,此位移角的变化决定了步进电机位置精度。根据上式得到:
θL=(2θM/π)arcsin(TL/TM)
PM型永磁步进电机和HB混合式步进电机的步距角θs在前面的课程中讲过即:θs=180°/PNr,角度改为机械角度(弧度),则变成下式:
θs=π/(2Nr)
上式Nr为转子齿数或极对数,所以两相电机θM=θs。
负载转矩为电磁转矩的负载(如弹簧力或重物的提升力等),电机如要正反向运动,会产生2θL的角度偏差,要提高位置精度,θL就要小,因此,依据式θL=(2θM/π)arcsin(TL/TM),应选择最大静止转矩Tm大、步距角θs小的步进电机,即高分辨率电机。根据式θs=π/(2Nr)可知,要使θs越小,Nr越大越好。
另外,高分辨率的步进电机的转子结构大致分为PM型、VR型、HB型三种,其中HB型分辨率最好。
由于PM型定子磁极为爪级结构的关系,定子磁极数的增加受到机械加工的限制。HB型转子表面无齿,N极与S极在转子表面交替磁化,因此极数即为极对数Nr,同样的,转子磁极Nr的增加也受到充磁机械的限制。VR型转子齿数与HB型相同时,因不使用永磁体,虽有相同的Nr,但是步距角θs为HB型的2倍,并且由于无永磁磁极,最大转矩Tm比HB型小。
当两相步进电机外径为42mm左右时,Nr=100齿,步距角0.9°,这 是实际使用中最高的分辨率。Nr变大,电抗也增加,则高转速下转矩会下降。因此,Nr=50,步距角为1.8°的电机被广泛使用。对HB型结构,全步进状态的步距角精度为士3%,步进电机运行角度θ=nθs,各步运行中无累积误差,电机的速度如足够大,尽可能提高n(θs小),以提高位置定位精度。
动态转矩特性
动态转矩特性包括驱动脉冲频率-转矩特性和驱动脉冲频率-惯量特性。
脉冲频率-转矩特性
脉冲频率-转矩特性是选用步进电机的重要特性。如下图所示,纵轴为动态转矩(dynamic torque),横轴取响应脉冲频率,响应脉冲频率用pps(pulse per second)作为单位,即每秒的脉冲数表示。
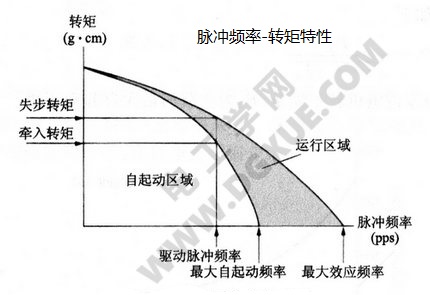
如图所示,步进电机的动态转矩产生包括失步转矩(pull-out-torque)和牵入转矩(pull-in-torque)两个转矩。前者称为失步或丢失转矩,后者称为起动或牵入转矩。牵入转矩范围为从零到最大自起动脉冲频率或最大自起动频率区域。牵入曲线包围的区域称为自起动区域。电机同步进行正反转起动运行,在牵入与失步区域之间为运转区,电机在此区域内可带相应负载同步连续运行,超出范围的负载转矩将不能连续运行,出现失步现象。步进电机为开环驱动控制,其负载转矩与电磁转矩之间要有裕度,其值应为50%~80%。
失步转矩与牵入转矩在0pps时相等。随着控制脉冲频率的增加,带负载能力会下降。在运行开始,控制脉冲频率应缓慢增加,以便利用低速下的大转矩,提供电机在低速运行时需要的加速转矩,减少加速时间。步进电机定子线圈的电感设计的越小,最大响应脉冲频率就越大,这样就可将慢加速驱动变为快加速驱动运行。
脉冲频率-惯量特性
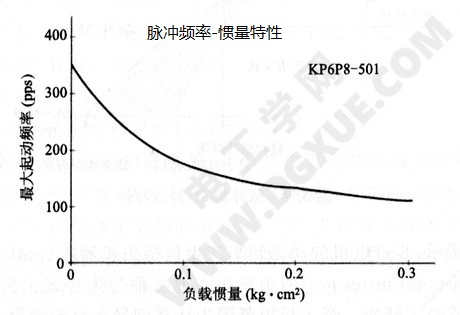
步进电机在带惯性负载快速起动时,须有足够的起动加速度。因此如负载的惯量增加,则起动脉冲频率就下降,为此,在选择步进电机时对两者要进行综合考虑。
下图纵轴为最大自起动频率,横轴为负载惯量,曲线表示负载惯量与最大自起动脉冲频率之间的关系。此处以PM型爪极步进电机(两相,步距角7.5°)为例。负载PL下,最大自起动脉冲频率PL与负载惯量Jc的关系如下:
式中,JR步进电机转子惯量,Ps为空载的最大自起动频率。
暂态转矩特性
由于步进电机转子惯量作用,即使空载运行一步,也会产生超越角(over-shoot),并在超越角与返回角(under-shoot)之间来回振荡,经过哀减后静止于所定角度,此为步进电机暂态响应特性。
下图表示步进电机的暂态特性,纵轴取转子移动角度,横轴为时间。△T为上升时间,△θ表示超越角,转子自由静止到设定位置的时间(通常到达步距角的士5%误差范围的时间)称为稳定时间(setting time)。
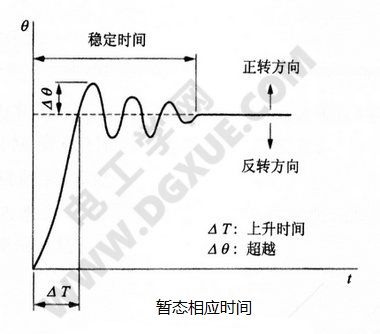
稳定时间越短,快速性越好,为了加快机构的运行速度,使稳定时间变短,步进电机的阻尼(制动)变得很重要。使稳定时间变短的方法有改变摩擦或改变惯量驱动等,在后面会详细介绍。
看了本文的人还看了
- 视频:三相异步电动机的转矩和机械特性
- 应用于自动机械、医疗器械及游戏机中的步进电机
- 旋转、摆动照明灯具中使用的步进电机
- 监控摄像机中使用的步进电机
- FDD(软盘驱动器)中使用的步进电机
- 打字机中使用的步进电机
- 传真机中的步进电机
- 复印机中的步进电机
- 步进电机位置定位精度的解决方法
- 步进电机改善暂态特性的解决方法
- 降低步进电机振动、噪音的解决方法
- 步进电机增加动态转矩的解决方法
- 选择步进电机的计算方法(附例题)
- 电机选择:根据使用环境来选用步进电机
- 电机选择:从转速变化率来选用步进电机
- 电机选择:从转速来选用步进电机
- 电机选择:步进电机位置定位精度的选用
- 根据步进电机种类、优缺点来选择电机
- 步进电机噪音、振动、速度变化的测量方法
- 步进电机暂态(阻尼)特性的测量
- 步进电机步距角度精度的测量
- 步进电机动态特性的三种测量方法
- 步进电机的静态转矩特性及测量方法
- 三相步进电机的驱动电路
- 步进电机附加制动驱动方法:反相序激磁与最终步进延迟
- 步进电机的加速、减速控制
- 步进电机闭环控制系统
- 步进电机三相细分驱动时的转矩
- 步进电机:细分步进驱动
- 步进电机的激磁方式
 鄂网公安备 42112502000017号
鄂网公安备 42112502000017号